
Scientists at China’s Tianjin University have 3D printed a customizable robot that’s capable of scaling and monitoring pipes at industrial facilities in real-time.
The single-piece device features a series of soft bending mechanisms and modular grippers, that allow it to flexibly climb oddly-shaped infrastructure. Given that pipeline breaks often lead to production delays, and many firms still inspect them manually, the team’s bots could represent a new, more efficient alternative.
The hidden art of pipe-climbing
Within many factories, pipelines represent a vital foundation on which industrial efficiency and ultimately manufacturing productivity depend. Even small breakages can cause significant disruption to production, hence constantly inspecting for leaks has become a necessity for a number of large-scale businesses.
At present, industrial firms tend to use staff to monitor their pipes manually, but this method is both labor-intensive and potentially dangerous, especially if the duct is carrying hazardous chemicals. As a result, the development of robots that can take on such perilous tasks instead, has become an important area of research.
Although previous studies have yielded an array of robotic solutions, they tend to be either inner or outer pipe-climbing devices, not both. What’s more, the former requires the transport network to be closed in order to work, and for pipelines buried underground, there’s no way of avoiding this by maintaining them from the outside.
With recent advances in soft robotics, however, fabricating complex devices has become easier, especially when compared to the complexity of using molding. Consequently, by adopting 3D printing, the Tianjin team were able to create an optimized device that’s able to inspect pipes more flexibly than before.
The Tianjin team’s 3D printed design
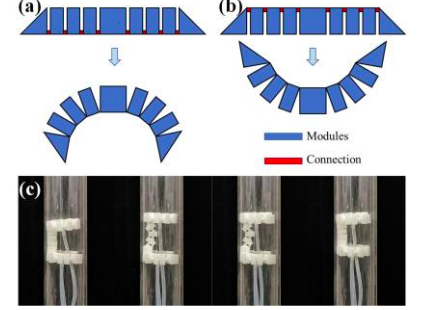
To maximize the flexibility of their bot, the scientists designed it with a one-piece soft bending mechanism, that was capable of sustaining high levels of deformation. Using CAD software to create the device also made it easily upgradable, and enabled the team to add modules or adjust the diameter of its grippers at will.
The robot’s layout consisted of a middle section with grippers at either end, as well as three intake pipes, allowing it to be controlled and apply pressure on-demand. By alternately pressurizing and depressurizing the device’s grippers, the scientists were able to perform a ‘climbing’ motion, albeit under their direct control.
During testing, the bot demonstrated a torque output of 85 Nmm, which was sufficient to climb pipes with a diameter of 16–38 mm, at a speed of 14 mm p/s. The device was also able to scale acrylic networks at angles of 45° and 90°, potentially making it ideal for inspecting inclined pipelines that can be difficult to navigate.
Given that their robot proved capable of climbing both internally and externally, and rotating in longitudinal or lateral directions, the team considered it to be an upgrade on existing designs. In future, the scientists intend to integrate sensors into their device, allowing it to become an autonomous pipe maintenance solution.
‘Walking’ with 3D printed soft robots
Thanks to the design flexibility provided by 3D printing, an increasing number of researchers have been able to produce innovative robots, capable of advanced walking, climbing and shimmying actions.
Researchers at the Ulsan National Institute of Science and Technology (UNIST) have created a 3D printed wall-climbing robot. Inspired by the natural capabilities of the gecko, the team’s quadruped bot is even able to scale wet surfaces.
Similarly, another team from UNIST has combined 3D printing with injection molding to produce a walking starfish-shaped robot. The device’s five ‘limbs’ act like tendons in a biomechanical system that can be actuated to perform controlled movements.
Elsewhere, scientists from the University of Illinois have integrated biological matter into their design by fusing a rat’s spinal cord into a soft robot, to create a 3D printed walking microbot. The bio-robot is powered by a patterned muscle contraction in the spine, which in turn moves its ‘feet.’
The researchers’ findings are detailed in their paper titled “Fully 3D-printed Modular Pipe-climbing Robot,” which was co-authored by Disheng Xie, Jianbin Liu, Rongjie Kang and Siyang Zuo.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Are you looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows a diagram of the team’s 3D printed robot climbing a pipe. Image via the IEEE Robotics and Automation journal.
