
Researchers at the Ulsan National Institute of Science and Technology (UNIST) in South Korea have created a 3D printed wall-climbing robot.
The quadruped robot is intended to imitate the functionalities of a gecko to climb steep surfaces and even repel water. The research team used nanoparticles to mimic the gecko’s water repellency and ability to climb in the rain.
Known as UNIclimb, “for universal climbing on surfaces in any orientation; with a structure, locomotion mechanism, climbing ability, and surface functionality similar to a gecko.”

Wall-climbing
The robot’s body was 3D printed using an sPro 60 HD-HS from 3D Systems. The selective laser sintering 3D printer fabricated the robot in Polyamide 12 which is a nylon material often used in the production of functional parts. Following the 3D printing process, the research team were then able to assemble the device without the need for glue or adhesive.
The adhesion pads, which were mounted to the robot’s arms and feet to provide its gecko-like movement, were created through a replica molding technique. Replica molding involves peeling the adhesive pads from a pre-made mold. Geckos are able to cling to surfaces using the tiny hairs on their feet.
The fine hairs on a Geckos footpad create van der Waals forces. These forces generate intermolecular attraction, and are also the subject of DARPA’s Geckskin – a project that could bestow Spiderman type abilities on the wearer.
The Geckos climbing ability also inspired the Korean researchers with their robot. The robot’s movement is powered by servo motors controlled by an Arduino microcontroller.
Water repellent
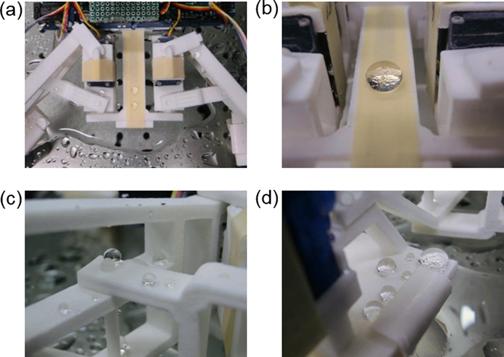
In addition to scaling surfaces like Spiderman, the researchers were also keen to create a robot able to operate in the rain or even underwater. To do so, they coated the robot’s body, including servo motors, with a coating of silica nanoparticles.
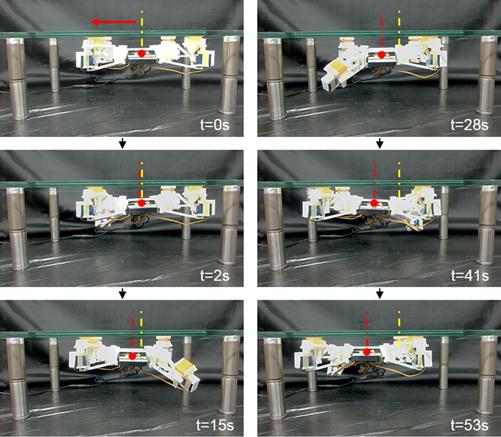
The researchers successfully evaluated this functionality by subjecting the robot to underwater testing. The robot also performed well scaling up a vertical glass surface and upside down, demonstrating its ability to walk on the ceiling.
Future gecko bots
The researchers were pleased with the initial success of the bioinspired robot and explain future work will involve improving the locomotion speed, adhesion of the pads and stability of the hydrophobic coating. With the ultimate aim of creating a practical robot with applications in air and water pollution monitoring.
Elsewhere in the ever-expanding world of 3D printed robots, Californian researchers have created an all-terrain soft robot and NASA has used 3D printing to develop an origami inspired robot to explore the difficult terrains expected on Mars.
The article, titled ‘Wall and ceiling climbing quadruped robot with superior water repellency manufactured using 3D printing (UNIclimb)’, has been published in the International Journal of Precision Engineering and Manufacturing-Green Technology. The paper was written by UNIST’s Hangil Ko, Hoon Yi and Hoon Eui Jeong.
For all the latest 3D printing research news, subscribe to the most widely read newsletter in the 3D printing industry, follow us on twitter and like us on Facebook.
Featured image shows a gecko’s feet. Photo by Matt Reinbold.
