
Engineers at UC San Diego’s Bioinspired Robotics and Design Lab have presented a paper demonstrating the use of 3D printing to make a robot capable of walking over uneven surfaces. Development of the four-legged device is in preparation for exploration of territories otherwise inhospitable to humans, such as deserts or rock faces.
Tarantula-like progression of the UC San Diego bot with 3D printed leg actuators. Clip via UC San Diego Bioinspired Robotics and Design Lab on YouTube
Finding the right combination
The legs of the robot are designed based on a bellows system, where each ‘bubbled’ segment is connected to the other allowing air to pass through. Air is provided by a system of tubes connecting to the top of the body, creating a tarantula-like movement as the compartments are emptied and filled.
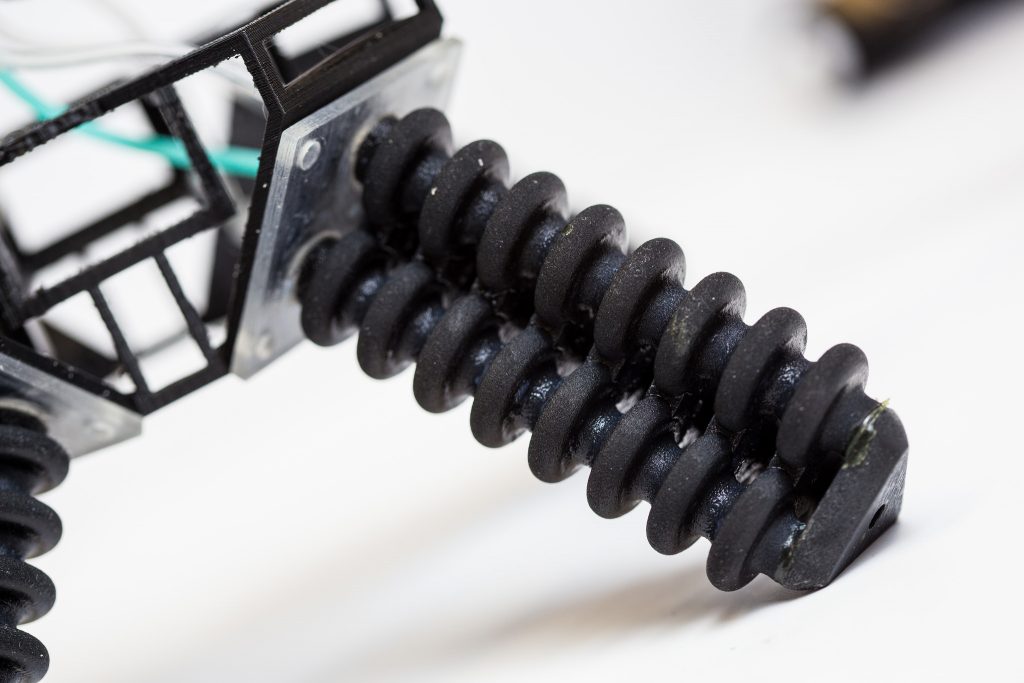
For material research purposes, only the legs of the robot have been 3D printed at this stage, on an Object 350 Connex 3 system from Stratasys. However, with the Object 350’s multimaterial capabilities, researchers stipulate that it is possible to 3D print the entire robot in both rubbery and stiff plastics.
The particular material used for the legs is a combination inbetween Stratasys’ rubbery TangoBlackPlus and rigid VeroClear, giving the desired consistency for friction moving over a surface, and stability to keep the robot upright.
Mountain high, valley low
Researchers have tested the quadruped on different surfaces designed to simulate real-world valleys, pebbles and rocks. In these tests, various gaits were programmed to identify the optimal motion combination. These gaits combine a number of operations, enabling the device to achieve backwards and forwards motion as well as rotation.
Rotational program of the robot. Clip via UC San Diego Bioinspired Robotics and Design Lab on YouTube
To further this research, UC San Diego engineers plan to untether the robot from its pneumatic cable to make it free roaming, and also incorporate sensors in the legs, adding the ability to record and monitor environmental conditions.
Rise of the machines
Other 3D printed robotics going boldly were no man has gone before include the ArcheoROV used to explore underwater minefields, and Part Time Scientist’s Audi Lunar Quattro Rover, seen at the 2017 world premier of Alien: Covenant.
Soft-robotic research is also of increasing interest to engineers in the field, as the flexible material opens up a new range of applications for the machines. The Lewis Lab at Harvard University have used 3D printing to create the water-powdered, autonomous Octobot, and Disney have filed a patent for its very own soft-robotic mascot with 3D printed parts.
The paper on the UC San Diego robot, titled 3D Printed Soft Actuators for a Legged Robot Capable of Navigating Unstructured Terrain, is to be presented by mechanical engineering graduate Dylan Drotman at the International Conference on Robotics and Automation (ICRA) 2017. It can be accessed online via the lab’s projects page here, and is co-authored by Drotman, Saurabh Jadhav, Mahmood Karimi, Philip deZonia and Michael T. Tolley.
For more of the latest 3D printing related research sign up to the 3D Printing Industry newsletter, like us on Facebook and follow us on Twitter.
Featured image: The all-terrain robot with 3D printed soft-robotic legs 3D printed by the Bioinspired Robotics and Design Lab at UC San Diego. Photo by UC San Diego Jacobs School of Engineering / David Baillot
