
Since launching in 2007, the Robot Operating System (ROS) has become the most widely used programming language for commanding robots. As an opensource language, the creation of ROS has made it easier for researchers to share information, repeat experiments and speed up the advance of robotic technology. However, although we have a standardized language (think Samuel Johnson’s first English dictionary) there is not yet a universal robot platform to go hand in hand with it. If you were publishing journals, for example, the last thing you would want to do is to reinvent the printing press every time. Enter TurtleBot 3: the machine with the potential to become the industry standard by taking advantage of 3D printed components.
Due to be released in 2017 at a price of $500, the TurtleBot 3 takes the popular modular approach to its composition, and can be transformed into virtually any configuration you can think of by simply printing out a new part.
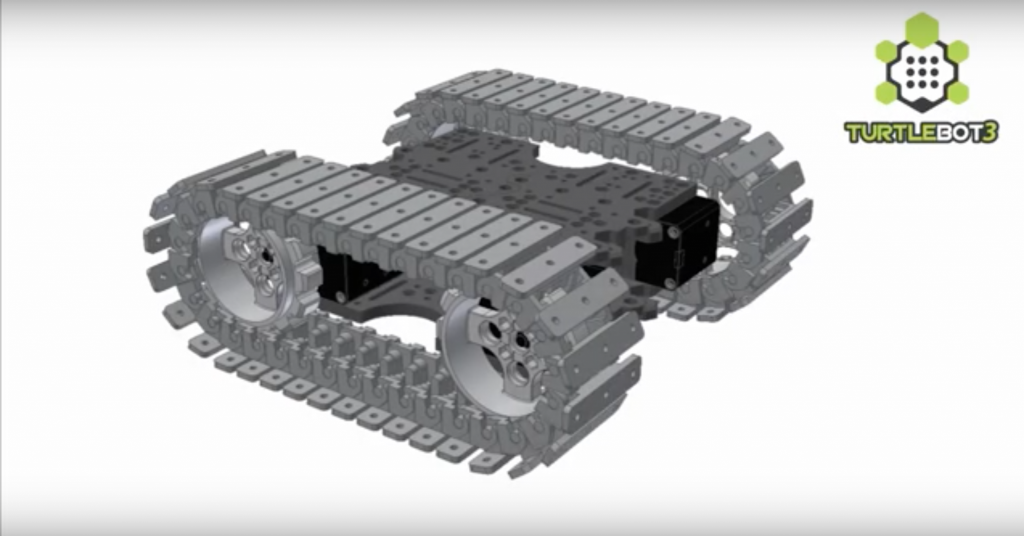
Some of uses imagined by the creators of Turtlebot include an all-terrain bot with printed caterpillar tracks;
a mobile robotic arm;

and our personal favorite;
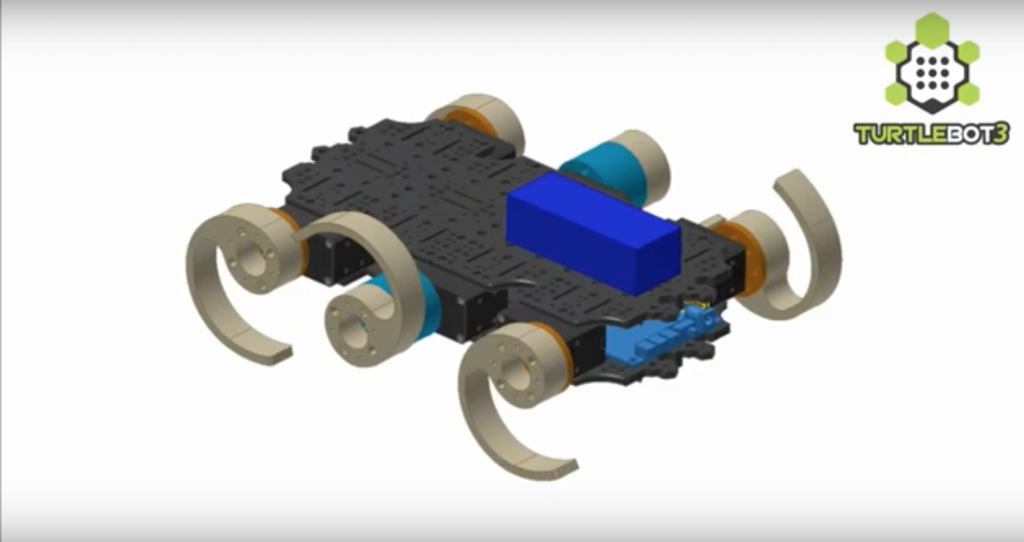
that may potentially be used for traversing uneven surfaces.
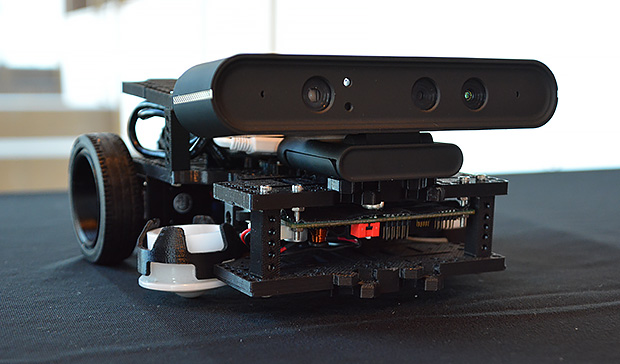
More advanced models, which can include extras such as a RealSense camera for Simultaneous Localization And Mapping, (SLAM) – which for the inexperienced is akin to the maps found in video games – or an Intel Joule board in place of your regular circuit board, the price for the TurtleBot 3 still only runs up to about $1000, which is a small price to pay for the potential it gives to present and future projects, especially when it comes to use for STEAM education and University research labs.
The new TurtleBot is a result of a collaboration between the Open Source Robotics Foundation (OSRF) and South Korean robot maker ROBOTIS, who also have offices in California. Both companies have the shared mission of developing robotics for the open-source user community, the OSRF being a non-profit organization established in 2012, and ROBOTIS first founded in 1999. TurtleBot’s first iteration was invented by Tully Foote and Melonee Wise back in 2013 while at Willow Garage, a personal robotics application developer for open source software and hardware also based in California and a strong contender for the accolade of the Bell Labs of robotics.
For more context and to see how independent inventors have been experimenting with ROS, see this 3DPI article on the now defunct Solidoodle 3D printer company being put to use by UK based inventor Davey Jose.
Featured image: Potential configurations of the TurtleBot 3 via ROBOTISCHANNEL on Youtube
