
Researchers from the Delft University of Technology (TU Delft) in the Netherlands have developed a method to concurrently optimize 3D printed structures and the fabrication sequence that creates them, specifically in the wire arc additive manufacturing process (WAAM).
The method comprises a topology optimization formulation capable of simultaneously enhancing the density field for defining the structural layout, and a time field which determines the fabrication process order. To explain the method, the researchers use the example of a robot constructing a bridge in a futuristic scenario, where bridge must maintain mechanical strength as it is being built in order to support the weight of the robot.
The research was recently awarded the ISSMO/Springer prize from the International Society of Structural and Multidisciplinary Optimization (ISSMO).

Considering the reality of bridge construction in the future
In the futuristic scenario, heavy robots move along a structure, in this case, a bridge, as it is being constructed. In standard examples of structural design, the most significant factor concerns the final performance of the structure once it is complete. However, when considering the futuristic scenario, the researchers explain that it is not only the final bridge design that is required to be mechanically strong. It also needs to support the weight of the robot during the incremental fabrication stages of the WAAM process, as well as the self-weight of the growing structure.
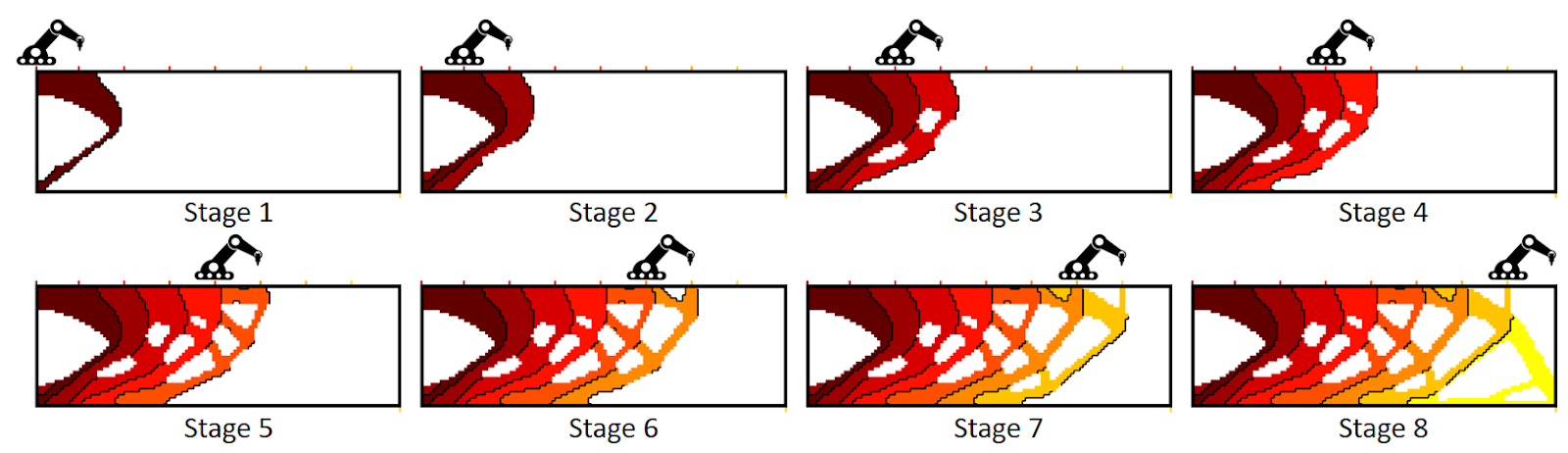
As such, the researchers investigated the methods that can be used to concurrently design the bridge and its fabrication sequence. To ensure the integrity of the structural design as it is being manufactured, the researchers leveraged topology optimization. In order to support the robot as it is manufacturing the bridge. The team opted to introduce a time field dimension within the design space. This can provide a fabrication sequence that directs the robot’s material deposition, so as to support the robot as it moves on top of the structure. The figures below, generated with the proposed method, demonstrates a robot platform moving on top of a structure as it is constructed, with support provided to the robot at each printing location.
Moving on to self-weight, which refers to the load on a structure imposed by its own weight, the researchers explain that this can have an impact on the structural properties of the growing bridge. Gravity can have a significant impact and deform intermediate structures additively manufactured using flexible materials like TPU. The researchers have therefore worked towards developing their optimization process to also address the compliance of intermediate structures caused by self-weight.
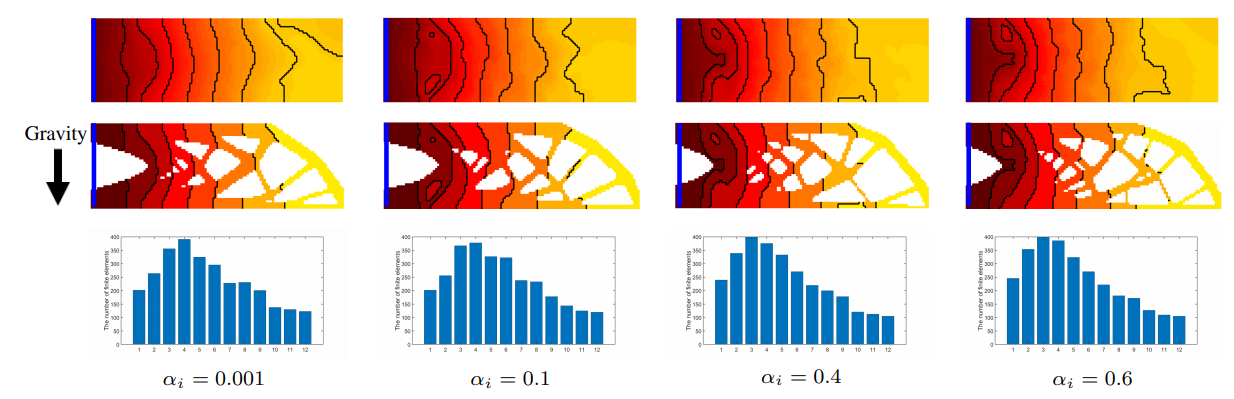
In this case, the factors considered are the final structure and its intermediate structures. The team at TU Delft also introduced a weighting factor to determine which part of the structure needs attention. The figure below showcases four structures generated with four different weighting factors for self-weight of the intermediate structures. As the weighting factor increases, the self-weight becomes an area of greater concern.
The researchers are currently continuing their work on minimizing distortion and residual stress in the WAAM process. They have arrived at a set of unpublished numerical results that demonstrate the significant influence of the fabrication sequence upon the distortion of 3D printed components. With optimization however, the researchers claim that this distortion can be reduced.
Additive manufacturing research at TU Delft
TU Delft has demonstrated a continuous output of research in additive manufacturing, both to help develop the technology, as well as its applications. For example, in August 2019, TU Delft researchers revealed the development of multi-colored 3D printed sensors that can aid the self-awareness and adaptability of soft robots.
In the field of metamaterials, researchers at TU Delft have created a 3D printed titanium hip implant. Metamaterials are materials engineered with properties that allow them to behave outside, or “beyond”, their nature. The “beyond nature” behavior of the implant means that patients wearing it could experience a better fit in the lifetime of the hip replacement with less wear and tear to the bone.
Regarding more novel applications, research out of the university has also surrounded the development of a 3D printed robotic fish capable of swimming through water at a speed of 0.85 meters per second, and a 3D printed chaise lounge that can swiftly transform into a bed.
The research paper discussed in this article, titled “Space-Time Topology Optimization for Additive Manufacturing: Concurrent Optimization of Structural Layout and Fabrication Sequence”, is published in the Structural and Multidisciplinary Optimization journal. It is written by Weiming Wang, Dirk Munro, Charlie C.L. Wang, Fred van Keulen, and Jun Wu.
The nominations for the 2020 3D Printing Industry Awards are now open. Who do you think should make the shortlists for this year’s show? Have your say now.
Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter and liking us on Facebook.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.