
Scientists at Singapore’s Nanyang Technological University (NTU) have developed a single-robot industrial platform that uses additive manufacturing (AM) to create concrete structures.
Adopting a print-while-moving approach, the team’s robotic arm is capable of 3D printing different sized single-piece structures, and completing large-scale construction printing, all by itself. The bot’s development could lead to the more effective application of AM in the construction sector, in addition to increasing the scale and structural properties of concrete formations that it’s possible to 3D print.
“Our system is mounted on a mobile robot. The ability to move the robot base in space allows our robot to print structures that are larger than itself,” said Pham Qunag Cuong, Associate Professor at NTU. “Also, having a mobile base makes it easier to bring the robot into the construction site and move it around inside.”
Utilizing 3D printing in concrete production
Advances in both 3D printing materials and system design, have brought with them the prospect of fully-automated construction, yet scalability remains a major obstacle to widespread adoption of AM in building and construction. For many of the existing gantry and arm-based printing systems, the sizes of the structures they can print are constrained either by the limited volume of the gantry, or by the reach of the robot’s arm. While some 3D printers have been mounted onto a mobile platform, printing can only be performed when the system is stationary, limiting the size of the structures that can be produced in a single take.
Gantry-based 3D printers are commonly utilized to perform construction-related tasks due to their similarity with conventional additive manufacturing methods, and subsequent ease of programming. Nonetheless, these machines have further drawbacks, such as the printing area of these systems, which cannot manufacture outside of the foothold distance of the gantry, and their weight requires them to be pre-installed. Arm-based systems offer a greater deal of flexibility, but they too are limited, and can only print within the reachable space of the arm.
The research team’s previous work had gone some way to resolving the scalability issues encountered during other studies. Using multiple arm-based printers with a holonomic mobile base to enlarge its printable area, the system was designed so that it wouldn’t be held back by common issues like volume constraints and long lead times. These systems required a great deal of preprogramming, involving the creation of multiple printing paths which prioritized collision avoidance, and as a result the team released an updated design.
Advancing their printing-while-moving paradigm, the researchers created single-piece structures of arbitrary sizes using a singular mobile robot printer. 3D printing at the same time as moving required these motions to be carefully planned and coordinated. In addition, precise robot localization and feedback motion control would be essential to ensuring that the nozzle deposited concrete at the correct pace. If the nozzle position were to offset by more than 1 cm between two consecutive layers, the structure could collapse. Despite these challenges, the research team remained confident that their revised approach would overcome the scalability restrictions of previous arm and gantry-based designs.
Constructing and testing the new robotic arm
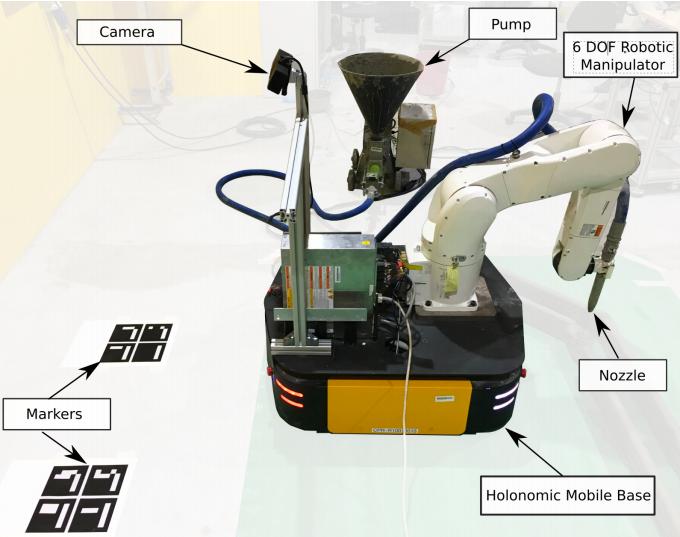
The team’s novel system consists of a holonomic mobile base with a 6-DoF industrial robot manipulator mounted on top, with a nozzle attached to the manipulator’s flange, which is connected to a pump via a hose. The coordinated motions of the mobile base and the robot arm are preprogrammed offline, in order to print the object in a layer-by-layer motion. During the execution of these planned movements, the position of the mobile base is monitored in real-time, and feedback control enables the team to track the motions as closely as possible. Not only does this prevent potential collisions with the arm and the base, but allows accuracy to be effectively observed throughout the process.
Using an Optitrack motion capture system, the team were able to test the precision of the 3D printing arm, by capturing its movements during an air printing session. The platform was accurate enough to build ten layers of concrete, producing a similar finish to that of existing based-systems. Additionally, the maximum distance between the fitted lines and the printer’s desired path was found to be 9.8 mm, which was considerably better than the previous best case of 20mm, recorded using conventional machines.
When tested in a production environment, the research team’s platform was able to create a structure which was 210 cm × 45 cm × 10 cm (length, width, height), significantly larger than the reach of the robot’s arm (87 cm). Moreover, after the material had been cured, the structure proved solid enough to be flipped and put on its side without breaking.
As a result, the researchers considered their in-situ 3D printing approach to creating concrete structures, to be a successful upgrade on their previous research. While the system proved capable of manufacturing 3D structures, the research team conceded that their technique could still be improved upon. Errors in the positions of the fiducial markers, and vibrations of the camera during movement for example, could be mitigated by more careful calibration, and the installation of vibration isolators to the camera.
Nonetheless, the productivity and accuracy benefits of the team’s new approach could still allow for more complex structures to be created using 3D printing, and at an accelerated pace, as Cuong explained: “We’re planning to add collaborative features to our robot. The idea is to have a human operator take the robot by hand and move it around the construction site, towards the desired location, guiding it to achieve high-precision assembly.”
3D printing within the construction industry
A myriad of mobile 3D printing systems have been created in recent years, with the aim of accelerating the manufacturing process.
Parisian large scale 3D printing firm XtreeE for instance, received funding from investors TTWiiN Investment Partners in June 2019, to develop its large six-axis 3D printing robot. The bionic arm is capable of printing concrete and clay with high precision, while the company also uses the bot to assist clients with collaborative design, and large-scale prototype manufacturing.
Robotics experts at the New York University (NYU) Tandon School of Engineering began designing a collective of robots equipped with 3D printers for autonomous and mobile construction in October 2019. The mobile 3D printers are designed to work in teams, through a concept called Collective Additive Manufacturing (CAM).
GXN Innovation, an independent research subsidiary of Danish architecture firm 3XN, launched its ‘Break the Grid’ program in July 2019. The initiative aims to establish more efficient methods of dealing with urban, social and environmental change, by modifying 3D printers to move autonomously.
The researchers’ findings are detailed in their paper titled “Printing-while-moving: a new paradigm for large-scale robotic 3D Printing” published by The Institute of Electrical and Electronic Engineers. The report was co-authored by Mehmet Efe Tiryaki, Xu Zhang and Quang-Cuong Pham.
You can now nominate for the 2020 3D Printing Industry Awards. Cast your vote to help decide this year’s winners.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows the single-robot industrial platform developed by the Singapore-based researchers. Image via The Institute of Electrical and Electronic Engineers.
