Researchers from The NYU Tandon School of Engineering and the Max Planck Institute for Intelligent Systems (MPI-IS) in Tübingen and Stuttgart, Germany, have designed and 3D printed an open-sourced quadruped robot dog called the ‘Solo 8.’
When compared to the price tag on Boston Dynamics the automated pooch relatively low cost and is easy and fast to assemble according to the team. The open-source robot dog can be upgraded and modified easily. This could allow research and development teams on limited budgets, including those at startups, smaller labs, or teaching institutions, to innovate and improve their mechanical pet design in the future.
“For a research group to develop such a robot themselves, it takes easily four years of work,” said Alexander Badri-Spröwitz, Leader of the Dynamic Locomotion research Group. “Additionally, you need a wide range of expertise. Our platform is the combined knowledge of several teams. Now any lab worldwide can go online, download the files and print the parts, and buy the remaining components from the catalog. And everybody can add extra features, within a few extra weeks. Done- you’ve got yourself a world-class robot.”
Using 3D printing to create a robot dog
Testing advanced control and learning algorithms using legged robots can require significant hardware development efforts or maintenance costs. Many existing systems aren’t commercially available either, making them difficult to compare, and sometimes very expensive. The robot dog created by engineering company Boston Dynamics for instance recently became available to purchase for $74,500.
In order to support rapid and broad progress in research, the team decided that its hardware, firmware, and middle-ware needed to become inexpensive and relatively easy to reproduce and implement. Making the designs open-source enabled this to happen while allowing robotic specifications to be compared more freely among 3D printed dog owners everywhere. Nonetheless, while projects such as “The Open Dog Project” and “Oncilla” have made their designs available, very few use an open-source torque-controlled legged robot platform as well.
In addition, while the Solo 8’s parts are waterjet cut and relatively easy to produce, other open-source projects mostly use position-controlled servo motors, limiting their applications in testing learning algorithms. The complex tooling and complicated mechanisms required to effectively alter joint stiffness in these bots adds additional barriers to accessibility for hobbyists and researchers alike. As a result, the team concluded that in order to make their robot as accessible as possible, it was necessary to minimize the number of parts requiring precision machining, and used 3D printing as an alternative.
This allowed the researchers to utilize inexpensive plastic 3D printing and high-performance brushless DC motors (BLDC) to produce parts. Additionally, the team could take advantage of the affordable miniature sensors, low power, and high-performance microcontrollers, and enhanced battery technologies, permitted by advances in the mobile-device market.
Overall, the research team aimed to create a lightweight robot dog because they are particularly relevant when testing advanced algorithms for dynamic locomotion, and act to accelerate testing cycles. Additionally, lightweight bots don’t require cranes or guiding structures to build, and can be operated by a single researcher in smaller laboratory spaces. These features are important when it comes to testing learning algorithms directly on real hardware, in a quick, safe, and cost-friendly way. Using this methodology, the team created the Solo 8, a novel, fully open-source, robotic dog featuring modular force-controlled leg architecture, that’s reportedly possible to build for $4,500 or less.
The methodology behind creating man’s new best friend
The robot dog’s actuator module consists of a brushless motor, 9:1 dual-stage timing belt transmission, a high-resolution optical encoder, and a 5000 count-per-revolution code wheel mounted directly onto the motor shaft. These modules are critical to the bot’s design, according to Felix Grimminger, a mechatronics engineer at Max Planck. “It was important to get this right. The core actuator is like the basic building block that we reuse with little variations over and over again,” he said. “That way we can build a zoo of robots.”
Two actuator modules were combined to create each of its limbs, and its feet were mounted distally, at the end of the lower leg. The bot’s joints proved to be multi-turn capable, and the completed bot was assembled from four identical legs and a 3D printed body structure. Weighing 2.2 kg, with a body length of 42cm, and width of 33cm, the robot pup could be controlled through wired communication via its TI and custom electronic boards, or wirelessly using WiFi network interfaces. Within the finished product, everything was contained within a 3D printed shell, and no wiring was left exposed. In addition, module assembly was simple, requiring very few separate parts, and components were either 3D printed or available off the shelf, except the motor shaft and pulleys, which were machined.
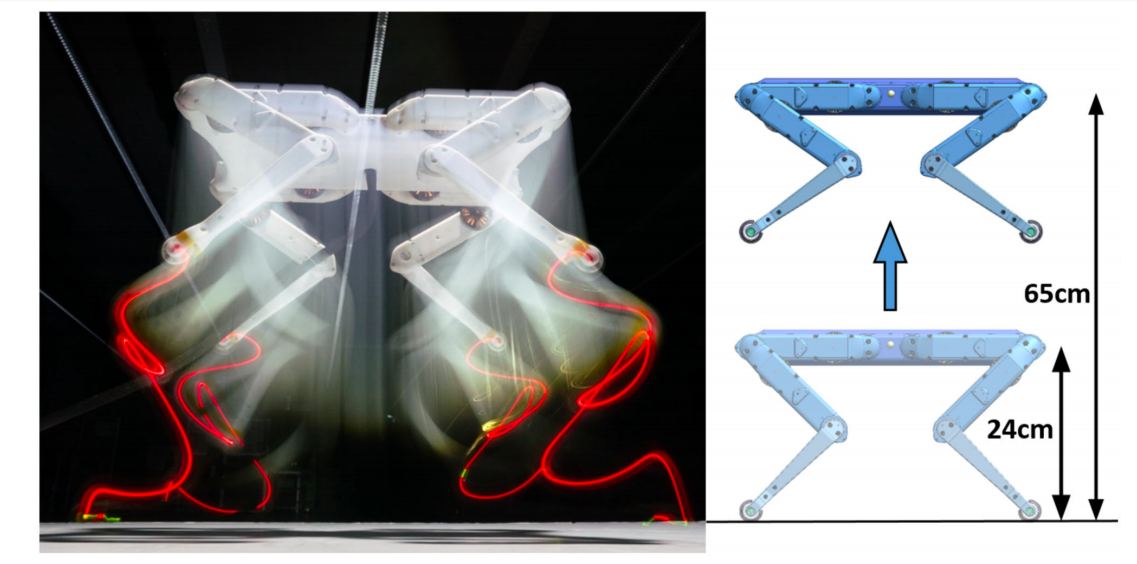
Testing proved that the Solo 8’s functionality, including torque-controlled motors and actuated joints, allowed it to behave like its more expensive bionic competitors. The team’s robot canine, for example, is able to perform jumping actions, walk in multiple configurations or directions, and recover orientation, posture, and stability after being overturned. Additionally, the bot provided a very high power to weight ratio, enabling it to jump up to 65cm in the air from a starting height of 24cm.
The robot canine’s advanced behaviors may benefit the robotics community, by lowering the barrier to entry and leading to further extensions of the additive bots. Future modifications could also potentially enable the bot to manipulate the environment and integrate advanced communication technology such as 5G as well. Universities are already approaching researchers at NYU Tandon, wanting to make a copy of their robot for research purposes, according to Ludovic Righetti, associate professor at NYU Tandon.
“Already many universities have approached us, and wish to make a copy of our robot and use it as a research platform,” said Righetti. “Our robot platform is a great base to quickly prototype and build high-performance hardware. In return we benefit because other researchers can contribute to the project; for example colleagues at the LAAS-CNRS in France, have developed an electronic board to help communicate with the robot over WiFi.”
The next step for the research team is to continue developing their new Solo 12 version of the dog bot. Featuring a total of twelve actuators, three per leg, initial testing showed that it’s even more versatile and able to display a wider range of complex behaviors than its predecessor.

Animals in additive manufacturing
3D printed robotic animals have been produced by researchers for a range of different applications in recent years.
Robotics engineers at the Georgia Institute of Technology, for instance, created the SlothBot for use in the Atlanta Botanical Garden. Featuring several 3D printed components, the slow-moving and energy-efficient robot can linger in the trees to monitor animals, plants, and the environment below.
Florida Atlantic University (FAU) scientists used 3D printing, deep learning, artificial intelligence, and robotics to create Astro, an intelligent robot dog. Using a quadruped robotic system developed by Boston Dynamics, the android pup is able to see, hear, and learn.
Researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), developed a Soft Robotic Fish called SoFi, which was created in part using 3D printed silicone rubber. Making minimal noise, the SoFi is designed to swim independently without disrupting marine life.
The researchers’ findings are detailed in their paper titled “An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research” published in the Robotics and Automation Letters journal. The report was co-authored by Felix Grimminger, Avadesh Meduri, Majid Khadiv, Julian Viereck, Manuel Wüthrich, Maximilien Naveau, Vincent Berenz, Steve Heim, Felix Widmaier, Thomas Flayols, Jonathan Fiene, Alexander Badri-Spröwitz and Ludovic Righetti.
You can now nominate for the 2020 3D Printing Industry Awards. Cast your vote to help decide this year’s winners.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows the research team’s Solo 8 robotic dog. Image via the Robotics and Automation Letters journal.
