
The 2021 3D Printing Industry Awards shortlists are open for voting, have your say now. Make sure to tune in to the live stream of the event on our YouTube channel.
Researchers from the University of Notre Dame have successfully 3D printed four-legged swarm robots capable of traversing complex terrain and overcoming obstacles in their path.
Yasemin Ozkan-Aydin, a Robotics Engineer and Assistant Professor of Electrical Engineering at the university, sought to mimic within the robots the collective behaviors of ants, honeybees and birds to solve problems.
The study explored how creating a physical connection between the individual robots could enhance the mobility and capabilities of a terrestrial legged collective system. For instance, if one robot came across an obstacle they could not overcome, the others would come together to collectively solve the problem.
“Legged robots can navigate challenging environments such as rough terrain and tight spaces, and the use of limbs offers effective body support, enables rapid maneuverability and facilitates obstacle crossing,” she said. “However, legged robots face unique mobility challenges in terrestrial environments, which results in reduced locomotor performance.”
Nature-inspired swarm robots
Researchers are increasingly drawing inspiration from the natural world and its inhabitants’ behaviors to develop aerial and underwater robotics for a variety of applications. Developing such robots with the ability to traverse complex terrain and overcome obstacles is, however, challenging.
In particular, several researchers have sought to map and mimic the behaviors of those in the animal kingdom that group together in self-organizing collectives, such as ant colonies, flocks of birds, and schools of fish. Despite attempting to replicate this natural collective intelligence, their swarm robots are often remote-controlled or GPS-guided rather than self-organizing.
3D printing was used in the creation of swarm robots for marine environments back in 2014 as part of the CoCoRo (Collective Cognitive Robots) project. The project saw the participation of five European universities and culminated in 40 3D printed mini-submarine robots that could work together to perform complex tasks.
More recently, a research group from Harvard University took another step forward in this field, having managed to 3D print a school of soft robotic fish that were capable of swimming in complex patterns without the aid of Wi-Fi or GPS. The robots’ self-sufficiency could see them be deployed for ecological monitoring applications in marine environments otherwise inaccessible to humans.
Currently, swarms of ground-based robots are limited to relatively simple environments, which Ozkan-Aydin says is partly due to a lack of locomotor capabilities to deal with difficult terrain. As such, in early 2020 she started conducting research and experiments to replicate the self-organizing behavior of animal colonies and flocks to improve the swarm bots’ capabilities.
3D printing the swarm robots
Ozkan-Aydin’s study is based on the premise that a physical connection between individual robots could enhance the mobility and capabilities of a whole system. Essentially, if a particular task was beyond the capabilities of a single robot, such as carrying an object, the robots would physically connect to each other to form a larger multi-legged system to collectively bear the weight.
“When ants collect or transport objects, if one comes upon an obstacle, the group works collectively to overcome that obstacle,” Ozkan-Aydin explained. “If there’s a gap in the path, for example, they will form a bridge so the other ants can travel across – and that is the inspiration for the study.
“Through robotics, we’re able to gain a better understanding of the dynamics and collective behaviors of these biological systems and explore how we might be able to use this kind of technology in the future.”
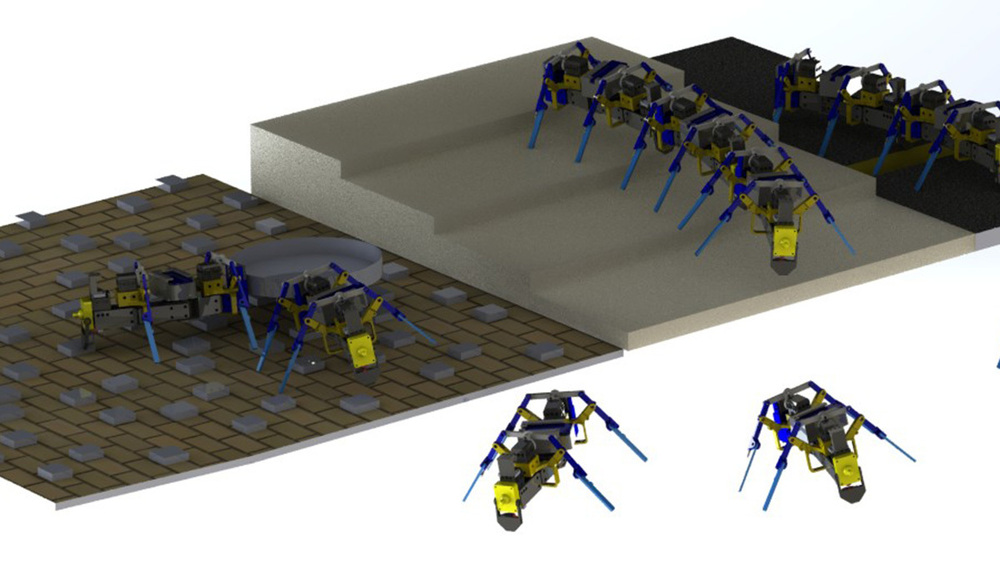
To create her swarm, Ozkan-Aydin used a 3D printer to produce low-cost four-legged robots measuring between 15 and 20 cm in length. Each robot was equipped with a lithium polymer battery, a microcontroller, and three sensors. In addition to a light sensor at the front, each robot featured two magnetic touch sensors at the front and back to enable them to attach to others in the swarm.
Each robot was 3D printed with four flexible legs, which according to Ozkan-Aydin gave the robots a level of “mechanical intelligence” and reduced the need for additional sensors.
“You don’t need additional sensors to detect obstacles because the flexibility in the legs helps the robot to move right past them,” she said. “They can test for gaps in a path, building a bridge with their bodies; move objects individually; or connect to move objects collectively in different types of environments.”
Testing the swarm
After 3D printing each robot, Ozkan-Aydin tested the robots’ capabilities over terrains such as grass, mulch and shag carpeting, and in overcoming obstacles like leaves and acorns. She tested the robots over flat ground on a particle board, and also built stairs using insulation foam and wooden blocks to serve as rough terrain.
When an individual robot became stuck on an obstacle, a signal was sent to other robots in the swarm. They then linked together via their magnetic touch sensors to provide support and successfully overcome the obstacle or terrain in question.
While Ozkan-Aydin admits there are still improvements to be made on her robot swarm design, she believes the study will help to inform the design of low-cost legged swarms that can adapt to unforeseen scenarios. She foresees her research aiding the development of swarm robots that are capable of performing real-world tasks such as search-and-rescue operations, transporting objects, environmental monitoring, and even space exploration.
Going forwards, Ozkay-Aydin will focus her research on improving the control, sensing, and power capabilities of the swarm robot system through further exploring the collective dynamics of insects such as ants and termites. Alongside improving the battery technology within the robots, future work will look at incorporating more sensors and more powerful motors, while maintaining their small size.
“For functional swarm systems, the battery technology needs to be improved,” she said. “We need small batteries that can provide more power, ideally lasting more than 10 hours. Otherwise, using this type of system in the real world isn’t sustainable. You need to think about how the robots would function in the real world, so you need to think about how much power is required, the size of the battery you use.
“Everything is limited so you need to make decisions with every part of the machine.”
Further information on the study can be found in the paper titled: “Self-reconfigurable multilegged robot swarms collectively accomplish challenging terradynamic tasks,” published in the Science Robotics journal. The study is co-authored by Y. Ozkan-Aydin and D. Goldman.
Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter and liking us on Facebook.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.
Subscribe to our YouTube channel for the latest 3D printing video shorts, reviews and webinar replays.
Featured image shows the 3D printed four-legged swarm robots. Image via the University of Notre Dame.
