
Researchers from Harvard University have 3D printed a school of soft robotic fish that are capable of swimming in complex patterns without the aid of Wi-Fi or GPS.
Inspired by the distinctive reef-dwelling surgeonfish, the team’s ‘Bluebots’ feature four fins for precision navigation, and a system of LEDs and cameras that enable them to swarm without colliding. The self-sufficiency of the tiny bots could make them ideal for ecological monitoring applications, in areas that wouldn’t otherwise be accessible to humans.
“Just by observing how far or close they are in a picture, they know how far or close the robot must be in the real world. That’s the trick we play here,” the study’s lead author Florian Berlinger told Wired.
“Robots are often deployed in areas that are inaccessible or dangerous to humans,” he added. “In these situations, it really benefits you to have a highly autonomous robot swarm that is self-sufficient.”
Inspiration from under the sea
The animal world is brimming with creatures that group into self-organizing collectives, ranging from ant colonies to flocks of birds, but schools of fish are particularly adept at it. Such sea-dwelling legions enable their constituent fish to navigate based on the perception of their neighbors, and ultimately to forage, migrate and avoid any predators.
Recently, a number of researchers have attempted to map and mimic this natural collective intelligence, but their swarm bots are often remote controlled or GPS guided rather than self-organizing. Similarly, other projects have envisioned underwater robotics for monitoring sensitive areas like coral reefs, but again, these have proved difficult to coordinate.
Within aquatic conditions, traditional radio or GPS communications have proved ineffective, necessitating the development of a novel synchronization approach. Inspired by real schools of fish, which use only implicit visual cues to guide them, the Harvard scientists therefore set about developing a new navigation system that required no external control whatsoever.
Schooling the soft robotic fish
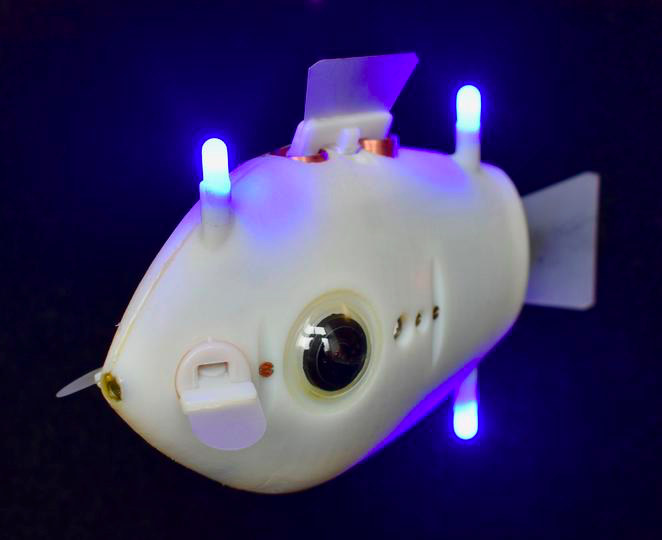
The Harvard team’s answer to this coordination conundrum was to 3D print seven autonomous miniature fish-inspired soft robots that they nicknamed the ‘Bluebots.’ Measuring just 235 cm3 each, the tiny bots feature a suite of sensors and actuators that enable them to perceive and move within all three spatial dimensions.
To provide the Bluebots with 3D vision, the scientists also fitted them with two 195° wide-angle lenses and a pair of vertically stacked blue-light LEDs. Essentially, the cameras function as the robots’ ‘eyes,’ and using vision-based algorithms, they’re able to quickly identify the position of their neighbors, and change course.
During testing, the Bluebots were programmed to periodically flash at a nominal time interval. This allowed them to converge into a swarm, in a movement that appeared from the outside, to be spontaneous. In later experiments, the bots were then set-up at different intervals, allowing them to switch repeatedly from dispersed to aggregated states.
As a final test, the scientists utilized implicit coordination algorithms to achieve a formation that was akin to ‘milling,’ a vortex-like movement used by real fish to avoid predators. The Bluebots were eventually able to achieve a minimized version of the phenomena, swimming in dynamic clockwise or anti-clockwise circles.
Moving forwards, the scientists believe that advances in camera and actuation technologies will enable the development of new, more complex underwater robotics. For now though, the team’s coordination technique could be applied to guide unmanned vehicles, in areas such as collective search and rescue missions.
Marine-inspired soft robotics
Although printing swarm-capable robotic fish has previously proved problematic, a number of researchers have managed to fabricate singular sea-dwelling soft robots, capable of marine monitoring applications.
Scientists from Florida Atlantic University (FAU) and the US Office of Naval Research, for instance, have 3D printed five soft robotic jellyfish. Based on the moon jellyfish, the eight-legged bots have been designed with neutral buoyancy, to enable their application as a reef-monitoring tool.
Similarly, researchers from the Massachusetts Institute of Technology have fabricated a soft robotic fish called SoFi, as a means of observing underwater wildlife. The silicone-based bot has already proved capable of capturing high-resolution images of marine life, while causing minimal disruption.
Elsewhere, a team based at the Korean Ulsan National Institute of Science and Technology have 3D printed a walking starfish-shaped soft robot. By combining an additive approach with sacrificial molding, the scientists were able to create a programmable device that can be actuated in controlled movements.
The researchers’ findings are detailed in their paper titled “Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm.” The research was co-authored by Florian Berlinger, Melvin Gauci and Radhika Nagpal.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Are you looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows one of the Harvard team’s 3D printed ‘Bluebot’ fish-inspired soft robots. Photo via the Self-organizing Systems Research Group.
