
Researchers at MIT have used 3D printing to create a new hydrogel device that can catch and release live fish. The transparent gel robots can perform a number of tasks involving forceful movements such as a grabbing and releasing.
Massachusetts Institute of Technology are known for their pioneering 3D printing research. Recently MIT researchers published a study focusing on adapting 3D printed objects in the post-production phase and also evaluating how to 3D print with graphene.
Elsewhere in the field of soft robotics, Harvard recently used 3D printing to create their Octobot device which was hailed as the world’s first completely soft robot.
How does it work?
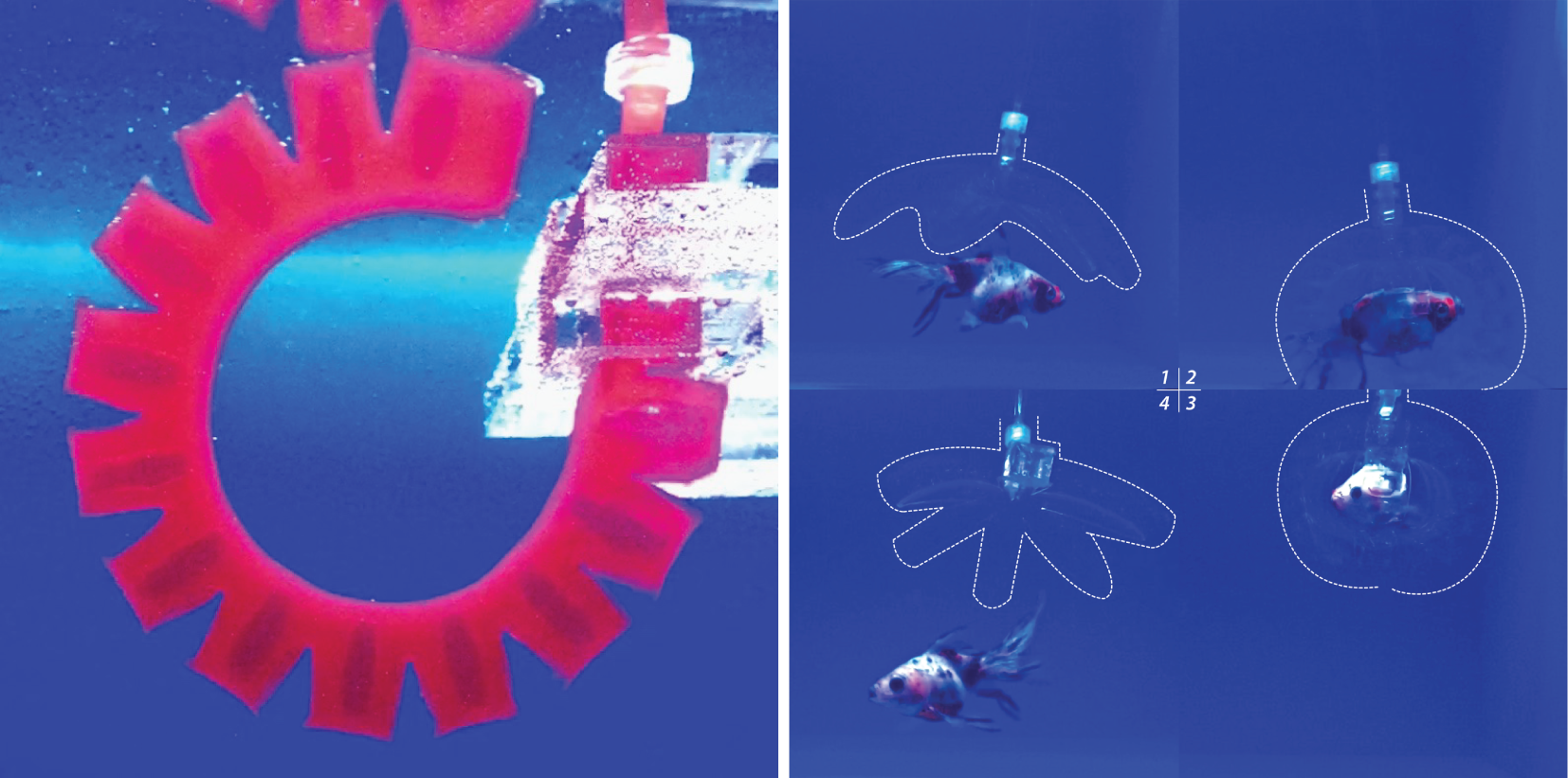
The device can be likened to a claw crane, similar to the one used in construction or in arcade machines. In order to function, water is pumped into the robot’s 3D printed arms. These hollow structures inflate enabling the bots “to curl up or stretch out.” This technique means the robot can expand and contract rapidly at a force of several newtons a second.
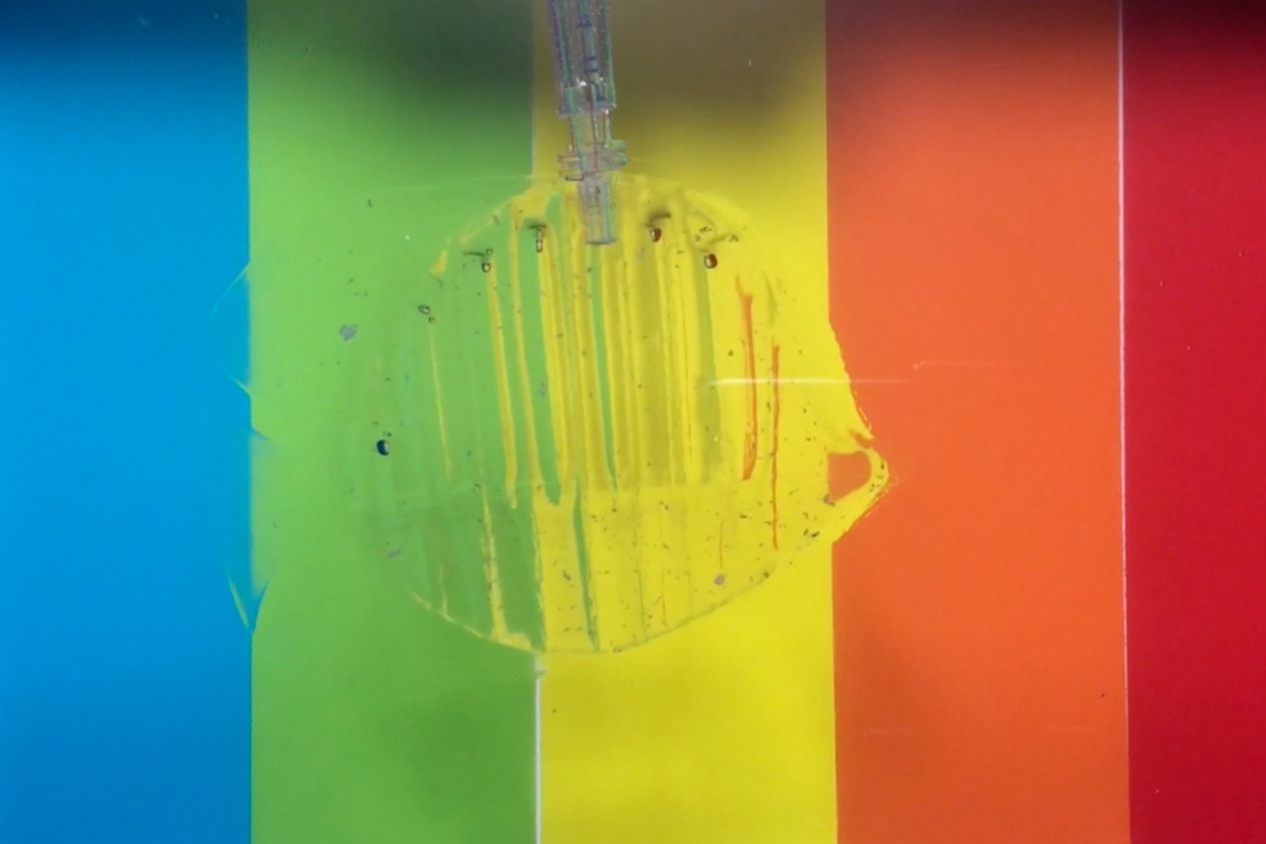
The device is made out of transparent hydrogel material so the robot is almost entirely formed of water. The substance is soft in nature and is therefore capable of grabbing objects like fish very delicately. Adding this to its transparency, the device is quite adept at sneakily capturing fish (as shown below).
Gif shows the soft robot catching and releasing a fish. Images via MIT.
The research group
The clever aquatic robot was developed at MIT by graduate student Hyunwoo Yuk under the supervision of associate professor of mechanical engineering and civil and environmental engineering Xuanhe Zhao. The research group have developed several forms of these hydrogel robots, “including a finlike structure that flaps back and forth, an articulated appendage that makes kicking motions, and a soft, hand-shaped robot that can squeeze and relax.” Researchers at Cornell have also developed their own hand-shaped soft robot recently, the GentleBot, which can feel external objects.
Associate professor Zhao details its fish-catching capabilities,
[The robot] is almost transparent, very hard to see. When you release the fish, it’s quite happy because [the robot] is soft and doesn’t damage the fish. Imagine a hard robotic hand would probably squash the fish.
But why?
There is, of course, more potential for this robot than catching and releasing fish. The team have explained that it could have medical application such as use in surgery. While the soft robot would not need to be transparent, the device would be beneficial for handling delicate body tissue. Particularly since the soft robot’s hydrogel material is biocompatible.
Zhao explains the potential of this research,
Hydrogels are soft, wet, biocompatible, and can form more friendly interfaces with human organs. We are actively collaborating with medical groups to translate this system into soft manipulators such as hydrogel ‘hands,’ which could potentially apply more gentle manipulations to tissues and organs in surgical operations.
The MIT research team have published their findings this week in the Nature Communications journal.
Sign up to our newsletter to stay updated with research into 3D printing.
Featured image shows the hydrogel gripper catching a goldfish. Photo via Hyunwoo Yuk.
