
Researchers from Harvard University have developed a method for creating soft robots with embedded sensors capable of sensing movement, pressure, touch, and temperature.
Inspired by the human “somatosensory system”, that gives us our physical abilities, the joint project between the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering produced a pneumatically soft robotic gripper capable of autonomously reacting to certain conditions.
“By directly printing ionic liquid sensors within these soft systems, we open new avenues to devise design and fabrication that will ultimately allow true closed-loop control of soft robots,” said project researcher Dr. Michael Wehrner.
How the sensors and the gripper work
Unlike UC San Diego’s soft robotic grippers that were made partially using 3D printing and coated with a nanotube-inlaid sensor skin, these soft somatosensitive actuators (SSAs) are embedded with their sensors.
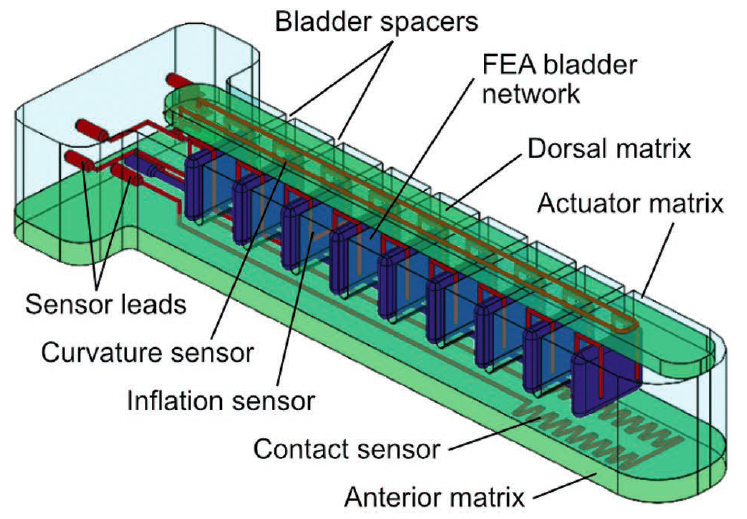
Each T-shaped SSA consists of three matrix layers made of an elastic polymer (elastomer), namely the dorsal, actuator, and anterior matrices. Each of these matrices contains a conductive ionogel “sensor” ink.
The dorsal matrix contains the curvature sensor ink, the actuator matrix contains the inflation sensor ink with spacers and a network of bladders that fill up with air, while the anterior matrix contains the contact sensor, attached to a set of electrical leads.
The curvature sensor correlates with SSA displacement, the inflation sensor indicates whether or not the displacement is intentional (i.e. the bladders are filled up intentionally), and the contact sensor indicates when the SSA is in contact with an object.
Manufacturing the SSAs
To manufacture the SSAs, the researchers applied a method known as embedded 3D printing (EMB3D), developed by the lab of 3D Printing Industry Academic of the Year 2017 Jennifer A. Lewis and used to fabricate an electronic second skin. EMB3D involves the simultaneous fabrication of a matrix and an embedded network of sensors.
Materials for three parts of the matrix (dorsal, actuator, and anterior) and two (sensor and fugitive) inks were prepared and 3D printed using a custom-built multi-material ABG 10000 3D printer from Aerotech Inc. into a mold assembly.
After printing was complete, the matrix materials were crosslinked and each SSA was removed from the mold assembly. Once the SSAs were cooled, the fugitive ink was removed and in its place, a stainless steel nozzle with Luer lock fixture and electrical leads were inserted through the actuator matrix into the inlets to the actuator network and all sensors.
The gripper and its applications
Each SSA consists of a resistive strain gauge, and since the SSA bends freely in a semi-circular way when inflated, anything obstructing this bending will make the inflation, curvature, and contact sensors increase the electrical resistance of the SSA, causing it to bend more.
This can be applied to a robotic arm gripper, which grabs objects tighter when any of the SSA arms are obstructed, since more resistance to the current flowing through it, the more air enters the bladders.
Researcher Robert Wood, who is the Charles River Professor of Engineering and Applied Sciences at Harvard said:
“The techniques developed in the Lewis Lab have the opportunity to revolutionize how robots are created — moving away from sequential processes and creating complex and monolithic robots with embedded sensors and actuators.”
Next, the researchers hope to harness the power of machine learning to train these devices to grasp objects of varying size, shape, surface texture, and temperature.
The full paper, “Soft Somatosensitive Actuators via Embedded 3D Printing” by Ryan L. Truby, Michael Wehner, Abigail K. Grosskopf, Daniel M. Vogt, Sebastien G. M. Uzel, Robert J. Wood, and Jennifer A. Lewis is available online in the Advanced Materials journal.
Do you know an inspiring 3D printing educator worthy of recognition? This is your final chance to put forward a nomination for the 3D Printing Industry Awards 2018. Submit yours now.
Want to design this year’s trophy? Protolabs is sponsoring the 2018 3D Printing Industry Awards design competition. Submit your design now to win a 3D printer.”
For more stories on 3D printing and soft robotics, subscribe to our free 3D Printing Industry newsletter, follow us on Twitter, and like us on Facebook.
Featured image shows a soft robot gripper with embedded sensors that can sense movement, pressure, touch, and temperature grabbing a ball. Photo via Harvard SEAS.