Scientists at the University of Illinois, Urbana-Champaign have once again turned to nature and designed a “bio-inspired” crawling robot by combining 3D printing technology with origami, electronics and the physics of the natural world.
The non-identical twin Robots, Poly and Peri, are powered by a mains circuit and by battery power respectively, but they both function according to the same principles.
Paper earthworms
Between the two 3D printed plates sits an origami structure, fundamental to the robot’s crawling locomotion.
Two central columns folded according to the “Kresling crease pattern” of origami (a chiral tower with a polygonal base) expand and contract in a screwlike motion. Their continuous motion is driven by an electric motor.
Housing the two columns are a set of external bellows that expand and contract along with them. Increasing the rate of expansion and contraction of either of the columns enables the robot to turn left or right accordingly.
At each corner of the robot’s underside is a curved foot structure, which enables the robot to rock back and forth instead of “dragging”.

The set up is based on the body of an earthworm as Assistant Professor Amy Wissa, one of the project’s leads explains, “the robot uses origami building blocks to mimic the gait and metameric properties of earthworms and directional material design to mimic the function of the setae on earthworms that prevents backward slipping.”
3D Printing: holding it all together
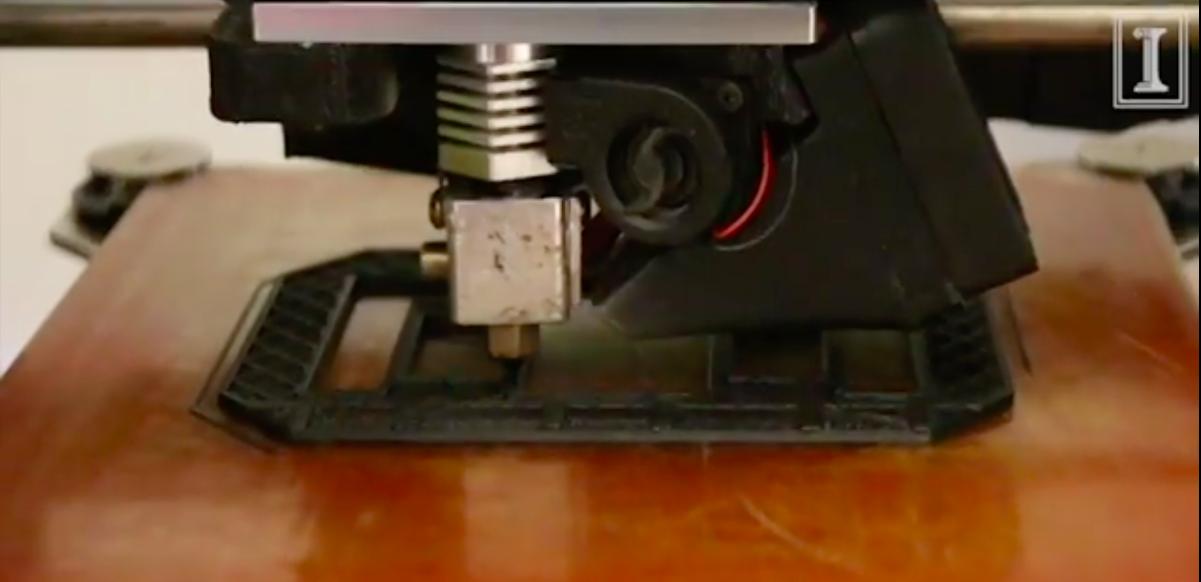
The 3D printed faceplates that sandwich the origami structures are essential for keeping the robot’s structure in place.
They firstly hold the “torque-limiter”, a rotating washer-like disk that prevents the internal towers from tearing, in place.
Additionally, the shape of the faceplates has been optimised for movement, accommodating the rocking motion with a shape that would be otherwise difficult to craft and optimise through other manufacturing techniques.
Implications for robotics and automation
The fusion of 3D printing and origami has already seen widespread application to robotics, medicine, and beyond. This particular project, and the research paper accompanying it, demonstrates the important part that 3D printing is playing in bringing automation one step closer to widespread availability and self-assembly.
The concept could also be used to make all terrain vehicles, cable of traversing dangerous territories.
Never miss a post on 3D printed robotics and more by subscribing to our weekly newsletter. Also find us on Facebook and Twitter.
Featured image: robots Poly and Peri, fully built and functional. Photo via Youtube/IMechSE.