
Researchers from the Japanese Yamagata University have developed a fully-3D printed actuator that could form the basis of a jellyfish-like soft robot.
Using a UV-based 3D printer, the team were able to cure a newly-synthesized Particle Double Network (P-DN) hydrogel, into a mechanism that contracts in a similar way to the muscles of a moon jellyfish. Building on their novel device, the scientists now intend to create an entire aquatic robot, with potential marine wildlife monitoring applications.

Eco-benefits of an aquatic bot
The benefits of developing soft robots that are capable of mimicking the behaviors of their organic counterparts, add up to more than just novelty value. Advanced devices hold the potential to be able to work alongside humans, going into places we can’t, within disaster management, ocean conservation, or even healthcare applications.
Such robots hold particular promise underwater, where they can gather further information about the ocean, and help further the UN’s Sustainable Development Goals (SDGs). One of the best ways to achieve this, is to create soft materials which imitate the locomotion of natural fauna, but so far even 3D printed octopus-inspired bots have had metal bodies, potentially making them damaging to marine life.
While many existing bots are powered by ‘legs’ made of silicone elastomers, hydrogels offer a less-intrusive alternative, as they are composed of around 90% water already. This composition is also similar to that seen naturally in jellyfish, which require significantly less energy to manoeuvre than other aquatic creatures, potentially making them an ideal basis for a marine-friendly monitoring robot.
Constructing a novel actuator
Before the Yamagata team began 3D printing their actuator, they synthesized a novel cross-linked P-DN hydrogel, composed of a hard and brittle first polymer, and a softer second layer. The material was characterized by a high-water content ratio, enhanced strength and excellent printability, forming a solid yet ductile basis for their device.
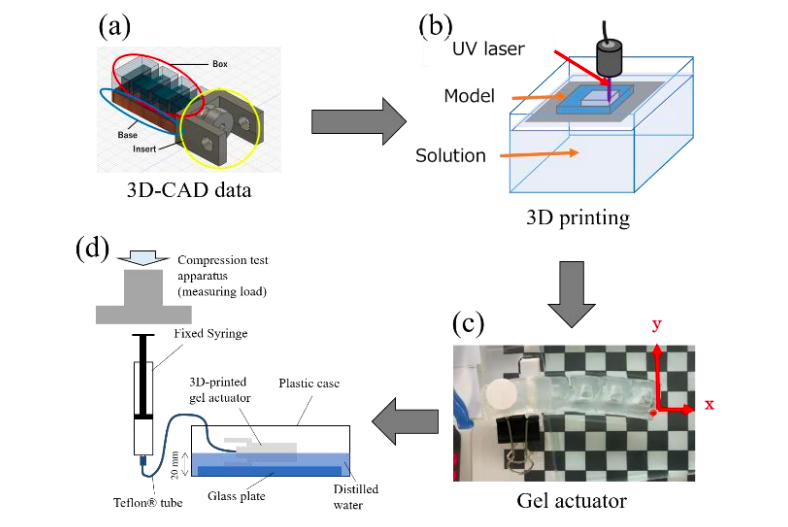
Once the formulation was ready, the scientists used a UV-based 3D printer to polymerize it into three separate parts: a connector, base and box. Theoretically, the ‘base’ and ‘box’ are designed to be deformed via the injection of air, creating the contractions needed to provide propulsion, while the ‘connector’ merely affixes a silicone tube to the actuator’s body.
For testing purposes, the team 3D printed five different prototypes, and found that the gel’s elasticity was heavily-linked to the type of monomer used, and the level of cross-linking achieved. Similarly, the actuators were produced with layer widths of 0.4-0.5 mm, as thicker layers exhibited a swelling that caused inconsistencies across the part.
During compression tests, in which air was injected into the actuator via tubing, the scientists found that they were able to control its deformations by adjusting the elastic modulus of its constituent parts. The device also demonstrated the same contraction ratio as that of the oblate moon jellyfish, potentially making it an ideal basis for a full robotic replica.
In future, the researchers believe that perfecting the relationship between the actuator’s wall thickness and its trajectory, will be key to developing improved device iterations. For now though, the Yamagata team intend to integrate their actuators into a novel jellyfish-inspired robot, with the ultimate aim of using it within marine conservation applications.
Animal-inspired soft robotics
While 3D printing robots for environmental monitoring purposes is a fairly noble endeavour, it’s by no means a novel one, and several similar bots have recently been developed.
Scientists from Florida Atlantic University (FAU) and the US Office of Naval Research have 3D printed soft robot jellyfish that’s capable of monitoring fragile coral reefs. The device consists of eight hydraulic actuators, which have been specifically designed not to cause damage to fragile biological ecosystems.
In a similar vein, a team based at Harvard University have created the ‘Octobot’ 3D printed autonomous soft robot. Like the Yamagata team’s actuators, the Octobot is pneumatic-based, but instead of using oxygen it transforms a small amount of liquid fuel into gas, to inflate its arms like a balloon.
Soft robots also have significant on-land monitoring applications, and engineers at the Georgia Institute of Technology have created a 3D printed ‘Slothbot,’ to look after wildlife at the Atlanta Botanical Garden. The device moves along a cable strung between trees, to observe the temperature, weather, and CO2 levels of the habitat below.
The researchers’ findings are detailed in their paper titled “Fully 3D-Printed Hydrogel Actuator for Jellyfish Soft Robots.” The study was co-authored by Yuki Takishima, Kazunari Yoshida, Ajit Khosla, Masaru Kawakami and Hidemitsu Furukawa.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Are you looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows a group of moon jellyfish. Photo via Kiara Sztankovics, Unsplash.
