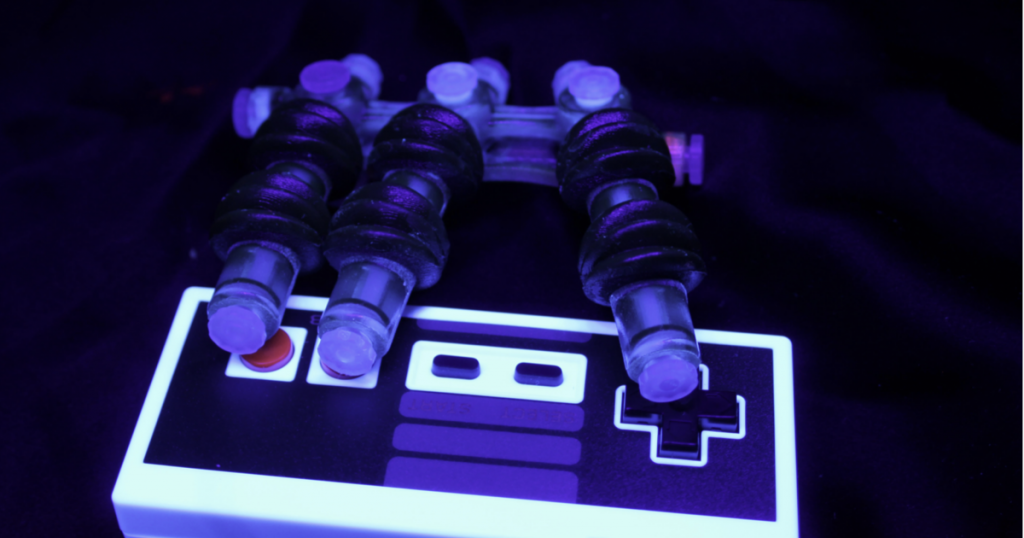
Engineers from the University of Maryland have used 3D printing to develop a robotic hand capable of playing a Nintendo Entertainment System (NES).
Printed using Stratasys PolyJet technology, the three-fingered soft robot features fully integrated fluidic circuits, meaning its movements are powered by air pressure rather than electricity. While the researchers could very well have opted for a standard demonstration to evaluate the hand’s performance, such as a piano piece, they decided the precision and goal-oriented nature of video games made for a better experiment.
Ryan Sochol, co-author of the study, wrote, “With a piano, we’d be able to set the tempo arbitrarily and any errors like missing a note wouldn’t have meaningful penalties. In contrast, the video game’s timing and level make-up have long been established and are invariable, with just a single mistake able to result in an immediate game over, so playing a game like Super Mario Bros. in real time provided a means for evaluating soft robot performance that was uniquely challenging and uncompromising.”
The 3D printed robot has since beaten the first level of Super Mario Bros.
What are soft robots?
As the name might suggest, soft robots are a special class of robot characterized by their malleability and morphability. They’re usually manufactured using flexible materials such as rubber or silicone, and have already seen use in medical and manufacturing applications for years.
Since they’re able to mold and expand around complex structures, soft robots can be implanted into the human body with little risk of tissue damage. This makes them a great area of research for applications such as surgical tools, drug delivery devices, and custom prosthetics. Additionally, they’ve also found their use in high-volume manufacturing facilities, where companies are increasingly employing soft robotic grippers on the production line.
“These special types of robots are powered using fluids like water or air,” Sochol told CBS. “Soft robots can stretch or be inflated or deflated relatively easily. As a result, they have inherent adaptability to reform around complex and sometimes delicate objects.”
Soft robotics experiments are also rife In the 3D printing sphere. Earlier this year, researchers from Harvard University 3D printed a school of soft robotic fish capable of swimming in complex patterns without the aid of Wi-Fi or GPS. Inspired by the distinctive reef-dwelling surgeonfish, the team’s ‘Bluebots’ feature four fins for precision navigation, and a system of LEDs and cameras that enable them to swarm without colliding.
Elsewhere, scientists at China’s Tianjin University have previously 3D printed a customizable robot capable of scaling and monitoring pipes at industrial facilities in real-time. The single-piece device features a series of soft bending mechanisms and modular grippers, enabling it to flexibly climb oddly-shaped infrastructure.
3D printing integrated fluidic circuits
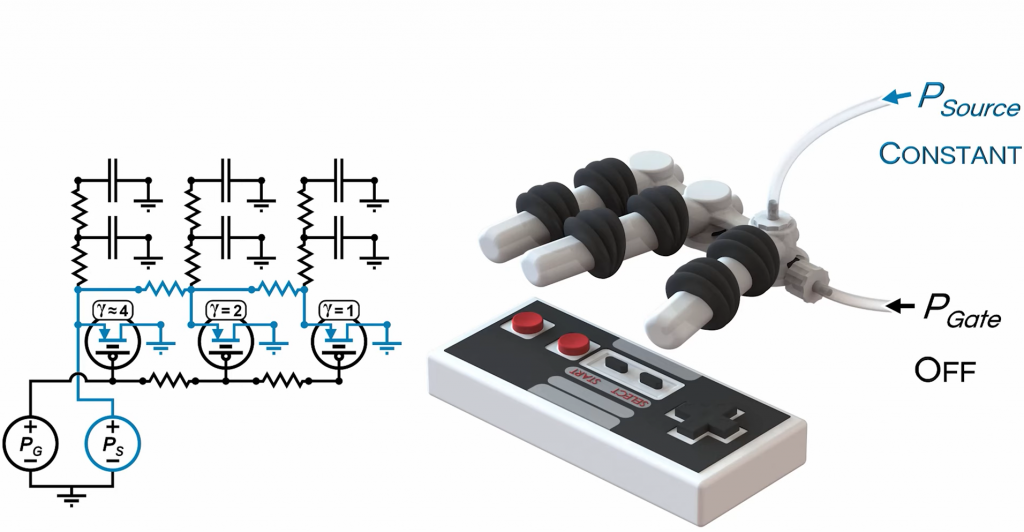
So what makes Sochol’s 3D printed robot design so unique? The Maryland researchers integrated what they called ‘fluidic circuits’ – the plumbing by which they were able to control the fingers of the robot. Rather than using semiconductor transistors to signal on and off like conventional electronic microchips do, the 3D printed soft robot leveraged pressure sensors in each of the fingers. The actuation of the fingers was then controlled by the air pressure running through the hand.
Sochol adds, “What’s special here is that we made a new type of fluidic circuit that can sense the pressure types of air to decide how it’s going to behave.”
For example, when there was no pressure, no fingers were activated. When there was low pressure, only the first finger activated. At medium pressure, the middle finger was activated and at high pressure, the final finger was activated. By programming different combinations of air pressures to run through the hand, the team was able to traverse World 1-1 on the NES controller and avoid all of the Goombas to get Mario onto the flagpole at the end.
In a bid to advance soft robotics and improve accessibility, Sochol and his team have very kindly open-sourced the design files for the robot on GitHub. Further details of the study can be found in the paper titled ‘Fully 3D-printed soft robots with integrated fluidic circuitry’.
Nominations for the 2021 3D Printing Industry Awards are now open, have your say in who is leading the industry now.
Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter, liking us on Facebook, and tuning into the 3D Printing Industry YouTube Channel.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows the 3D printed soft robotic hand. Photo via University of Maryland.
