
Researchers from the Massachusetts Institute of Technology (MIT) have created a design pipeline to streamline the process of building a customized robotic hand with tactile sensors.
Users do not need any specialized knowledge to execute the new design pipeline, which is reportedly far quicker than the traditional trial-and-error process of designing a custom robotic manipulator. Once users have tailored their designs, the manipulator is 3D printed and the sensors are incorporated through a knitted glove that fits over the robotic hand.
“One of the most exciting things about this pipeline is that it makes design accessible to a general audience,” said Lara Zlokapa, lead author of the study and MIT student.
“Rather than spending months or years working on a design, and putting a lot of money into prototypes, you can have a working prototype in minutes.”
MIT has been involved in a number of innovative 3D printing projects over the years. This year alone, teams from the university have developed a new method of embedding information into physical objects via 3D printing that is invisible to the naked eye, and come up with a new technique to 3D print objects that change their appearance depending on the angle they are viewed at.
Most recently, researchers from MIT and the University of Calgary have developed a new kind of shapeshifting robotic cube using 3D printing technology. Called ElectroVoxels, the self-configuring robot blocks can assemble themselves into all manner of shapes using an embedded electromagnet as an actuation mechanism.

The integrated design pipeline
Typically, robot experts can spend months manually designing a custom robotic manipulator through trial-and-error techniques. Additionally, each design iteration can require new parts that need to be designed and tested from scratch.
The MIT team sought to drastically reduce the time and complexity of this process by creating an integrated design pipeline to enable users with no specialized knowledge to rapidly create a customized 3D printable robotic hand.
Described as similar to building with digital Lego blocks, a designer can use the team’s intuitive interface to design their own tailored robotic manipulator from a set of 15 modular components that are guaranteed to be 3D printable. After mixing and matching the components in a 3D design space, the designer can adjust the palm and fingers of the robotic hand to suit a specific task before integrating tactile sensors into their final design.
The interface is based on a set of production rules known as graph grammar, which control how users can combine different components.
“If we think of this as a Lego kit where you have different building blocks you can put together, then the grammar might be something like ‘red blocks can only go on top of blue blocks’ and ‘blue blocks can’t go on top of green blocks’,” said Zlokapa. “Graph grammar is what enables us to ensure that each and every design is valid, meaning it makes physical sense and you can manufacture it.”
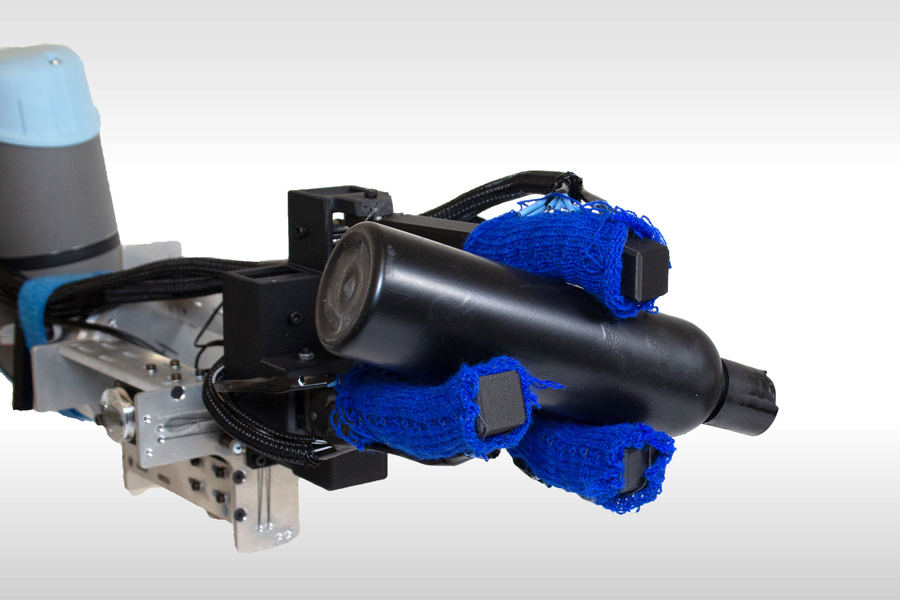
Having created the manipulator structure, the user can then deform components to further customize them for a specific task, such as creating fingers with slimmer tips to handle office scissors, or curved fingers capable of grasping bottles. To enable this, the software surrounds each component with a digital cage that can be stretched and bent, however the movements are constrained to ensure the pieces still fit together properly and can be manufactured.
Once the design has been finalized, MIT’s software automatically generates 3D printing and machine knitting files to produce the manipulator. The tactile sensors are then incorporated into the robot through a knitted glove that fits snugly over the hand and enable it to perform complex tasks like picking up items or using tools.
Integrating sensors
Once the user has designed, customized and 3D printed their robotic manipulator, they can then choose the desired locations for tactile sensors. The sensors are integrated into a knitted glove that fits securely around the manipulator and is formed of two layers; one with horizontal piezoelectric fibers and another with vertical fibers.
Piezoelectrical material produces an electric signal when squeezed, and when the horizontal and vertical fibers intersect, they convert pressure stimuli into electric signals that can be measured and form tactile sensors.
Zlokapa and her team chose to integrate the sensors into gloves as they are easy to install and replace in case the sensors are in need of repair.
To test the effectiveness of their design pipeline, the MIT researchers 3D printed four custom manipulators for a variety of different tasks, including picking up an egg, cutting paper with scissors, pouring water from a bottle, and screwing in a wing nut.
Each of the manipulators performed their tasks adequately, with some even exceeding the team’s expectations. However, the researchers did observe that the sensors created a lot of noise due to the uneven weave of the knitted fibers, which hampered their accuracy. The team is now working on creating more reliable sensors that could improve the performance of the manipulators.
Zlokapa and her team are also exploring the use of autonomous manufacturing, where algorithms could search the design space to determine optimal configurations for a task-specific robotic hand without human intervention.
“Now that we have a way for a computer to explore this design space, we can work on answering the question of, ‘Is the human hand the optimal shape for doing everyday tasks?’ Maybe there is a better shape?” added Zlokapa. “Or maybe we want more or fewer fingers, or fingers pointing in different directions?
“This research doesn’t fully answer that question, but it is a step in that direction.”

Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter and liking us on Facebook.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.
Subscribe to our YouTube channel for the latest 3D printing video shorts, reviews, and webinar replays.
Featured image shows one of MIT’s customized 3D printed robotic hands. Photo via MIT.
