The intelligent design of origami models continues to inspire new developments in 3D printing. At Case Western Reserve University (CWRU) in Cleveland, Ohio, a team of researchers led by assistant professor Kiju Lee have created the TWIsted TowEr Robot (TWISTER) mechanism.
Based on the twisted tower originally designed by Mihoko Tachibana, the mechanism is inspiring the creation of soft robotic arms and all-terrain exploration vehicles.

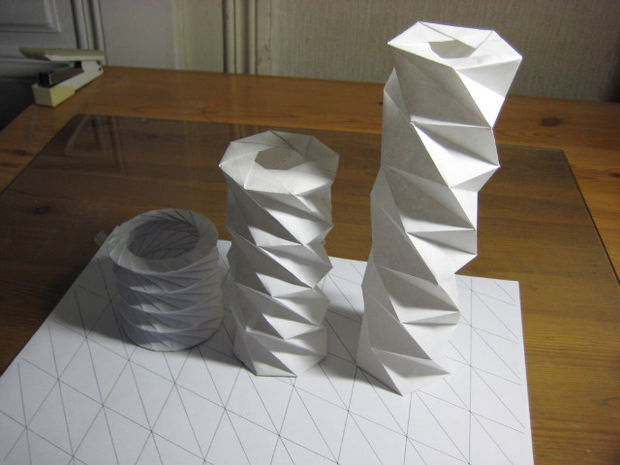
Paper and plastic
The appeal of the age-old art of paper folding is in the versatility it brings to minimal materials. By correctly folding a single sheet of paper, artists can create solid objects that move, but that can also be disassembled to their original state. The same is true when working with other materials, such as polymers.
TWISTED robots
The Lee team’s TWISTER mechanism follows a composition of polygons and other geometric shapes, culminating in a tower that can bend freely in all directions. It is a multimaterial design, 3D printed on a Stratasys Objet350 Connex3 in VeroClear and TangoBlackPlus resins for respective rigid and flexible parts.
With added electronics (powered by Raspberry Pi) the team has used TWISTER to make a soft robotic arm capable of gently handling objects such as eggs and fruit. Because of its unique design, the arm absorbs excessive force by flexing in response. The soft materials also mean the now patent-pending design could be added to assembly lines in place of other more rigid, and often enclosed, robotic arms. As Lee explains to CWRU daily “TWISTER is very different from rigid body robots […] Because this robot can be made with soft materials it could be safe to use on an assembly line right next to people.”
To infinity and beyond
TWISTER was first demonstrated by CWRU as a worm-like all terrain robot. Toward the future, the Lee team is looking to use shape memory alloys to realise the TWISTER design.

Shrinking it down to a microscopic scale is another possibility for medical use, and Lee even sees potential for off-world application, “To put anything into space,” she adds “volume and weight are critical, because of the cost of rocket transport. This robot is fully collapsible and, compared to a rigid arm, light and compact.”
The TWISTER project is supported by two papers recently presented at the 2017 NASA/ESA Conference on Adaptive Hardware and Systems (AHS) and the IEEE/RSJ International Conference on Intelligent Robots and Systems. Supporting Lee in the research are Yanzhou Wang, Evan Vander Hoff, Donghwa Jeong and Tao Liu.
For more of 3D printing related research and news follow 3D Printing Industry on Twitter, find us on Facebook and subscribe to our regular newsletter.
Featured image shows Case Western Reserve University’s 3D printed TWISTER arm. Photo by Russell Lee/CWRU
