
Since August 5th 2012 the Mars Curiosity Rover has been live tweeting its movements from the surface of the red planet to almost 4 million followers all around the world.
Back on Earth and 10,994 metres (36,070 ft) under the sea however, there is no such luxury of wireless communication.
To date, only four planned missions have made the descent to the floor of the Mariana Trench, a crescent shaped scar in the Earth’s crust stretching across the seafloor between Japan, Philippines and Papua New Guinea.
Immense pressures, pitch darkness and water density all stand in the way of our understanding of the deep ocean, and yet somehow, there are living creatures down there that manage to stand the pressure.
Sea anemones are one of the few living organisms discovered inhabiting the hadal zone (named after Hades) between 6,000 and 11,000 metres (20,000 to 36,000 ft) below the sea. Adapting to the extreme environment, these organisms have soft bodies enabling them to withstand the pressure, while pedal discs provide strong-suction keep them attached to rocks, even in a strong undercurrent.
The remora suckerfish, often found attached to surfaces like the hulls of boats, turtle shells, sharks and dolphins, has a similar adhesive disc. Combining nature-mimicking soft robotics with 3D printing, a new Science Robotics study has created a remora-inspired gripper that could help scientists learn more about The Great Unknown.
A remora inspired gripper shows off its plate lifting skills. Moving .gif image via Science Robotics journal supplementary materials.
A 3D printed marine hitchhiker
The replica remora disc is made from micromachined carbon fiber spinules with a base diameter of 270 microns. These spinules are embedded in a rigid plastic body, in the center of a soft lip. Both rigid and flexible parts of the device were 3D printed using a multimaterial Objet Connex500 C3 3D printer from Stratasys. CAD models were made using microCT image data of a remora fish in SolidWorks2014 software.
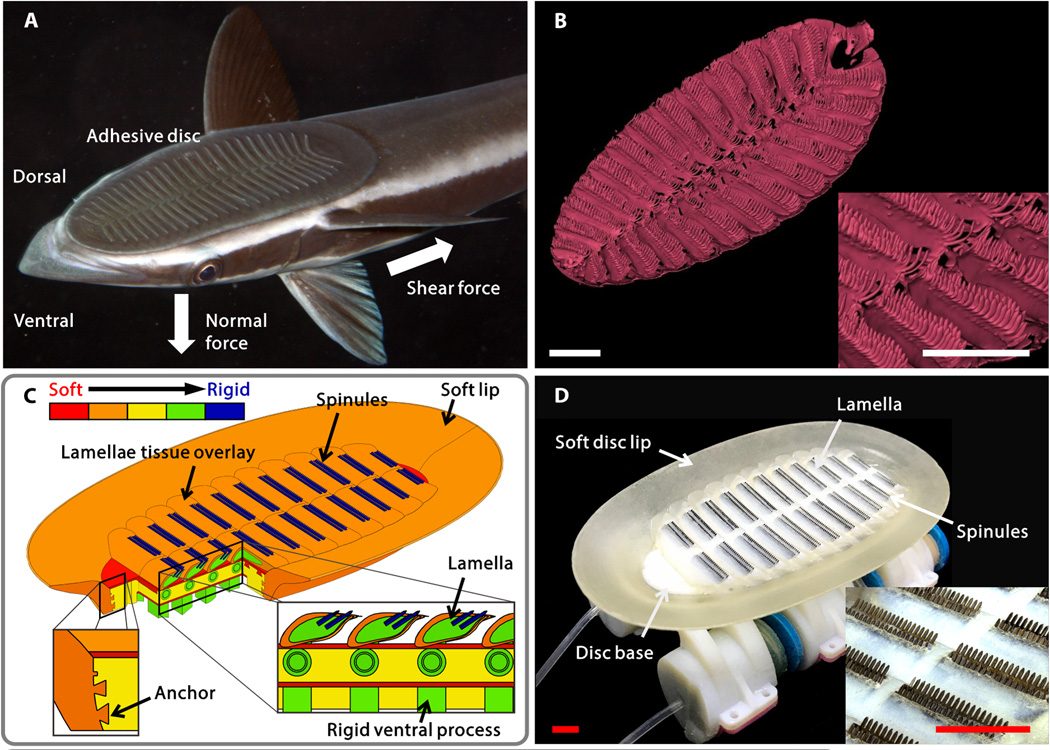
The gripping spinules are activated using pneumatic pressure cylinders, turning the ridges up (attached), or folding them back (released) as needed.
The incredible suction of the robot makes it capable of lifting almost 100 pounds. It can pick up an twist a pane of glass, wood, a CD case, a juice box and a cellphone with ease. The suction disc is also capable of “hitchhiking” on smooth, rough and shark-skin like surfaces, this would enable underwater exploration devices like ROVs to latch on and gather deepsea intelligence.
The team
Multidisciplinary researchers, Yueping Wang, Xingbang Yang, Yufeng Chen, Dylan K. Wainwright, Christopher P. Kenaley, Zheyuan Gong, Zemin Liu, Huan Liu, Juan Guan, Tianmiao Wang, James C. Weaver, Robert J. Wood are Li Wen, are conducting remora-inspired robotics design at Beihang University, China with input from Harvard University, MA.
Smooth operator – a ROV with gripper attached sucks to the smooth surface of a water tank. Moving .gif image via Science Robotics journal supplementary materials.
For more 3D printing research articles, sign up to the 3D Printing Industry newsletter, like us on Facebook and follow us on Twitter.
Featured image shows the Remora inspired cover of Science Robotics, published 20 Sep 2017. Image via Science Magazine
