
A Programmable World
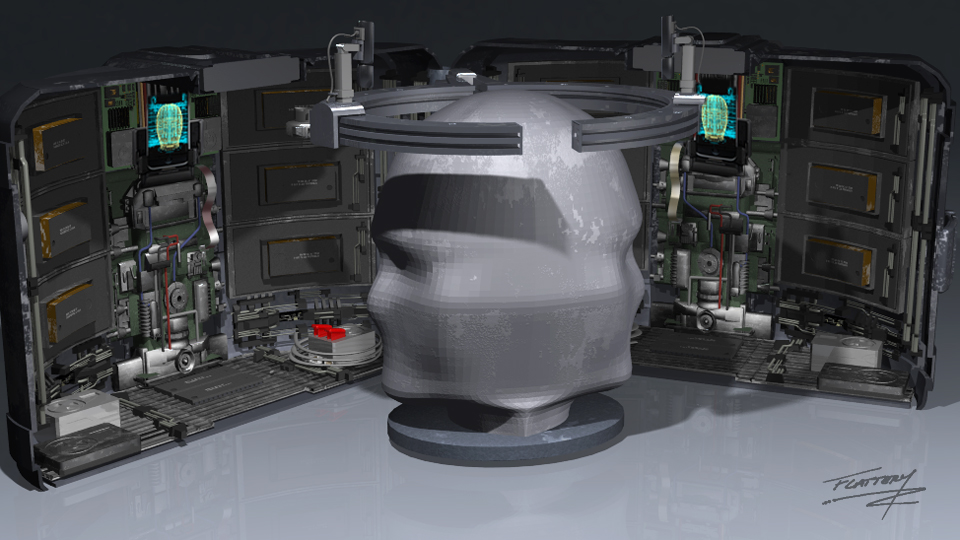
In “Mission: Impossible III”, agent Ethan Hunt played by Tom Cruise is called to duty to confront an arms dealer. One of the most memorable scenes shows a machine that duplicates a person’s face by instantly producing a wearable mask (Figure 1). Although it is a fictional product, the machine was very convincing and believable.
Additive Manufacturing (AM) or 3D printing has been around for nearly three decades since the late 1980s. In this process, parts are built a layer at a time. It offers tremendous, well-documented, benefits such as freedom of geometry and supports the personalisation of products. However, one major drawback is that parts built by conventional 3D printing are generally static and built for a specific purpose. For example, they include full colour 3D prints for visual prototypes, functional models for mechanical fits, and end use parts such as turbine blades for aerospace and cranial implants for medical purposes.
Advancements in AM hardware and increasing knowledge of material science have led to an emerging technology cycle. This is 4D printing where time as the fourth dimension is combined with conventional 3D printing processes. It is not about how long it takes to print a part; but rather the fact that a 3D printed object, after being built, still continues to evolve over time (Pei, 2014). It is also not limited to a particular type of 3D printing technique, part geometry or the type of material being used. 4D printing is unique because printed parts can still physically or chemically change by responding to the surrounding environment. The key ingredient is the selective use of adaptive, biomimetic composites whereby parts can re-shape when subjected to external stimuli.
Exciting Times Ahead
Skylar Tibbits who heads the Massachusetts Institute of Technology’s (MITs) Self-Assembly Technologies Lab, is well-known for his leading research on 4D printing and self-assemblies. The research at MIT has focused on the geometry and mechanical computation to understand how additively manufactured parts can have additional functions in-situ (Tibbits and Cheung, 2012). In their early work, they demonstrated the use of a multi-layered material made from an absorbent substance that expands up to 150 percent when immersed into water. They designed a part with living hinges, which have been pre-programmed in such a way that will fold at a pre-determined angle that eventually forms into a new structure. For this to occur, specific materials are carefully chosen so that they tap on the unique properties of each material that activate the self-assembly process. Other stimuli include heating and expansion, cooling and contraction, fluids and capillary action; and other sources include gravity, magnets, wind, vibration, tension or compression etc.
Recently, scientists from the University of Colorado and Singapore University of Technology and Design developed an alternative method of building 4D structures. Ge and his team (2014) developed shape-memory polymer composites with glassy fibres to produce 4D parts whereby a Computer Aided Design (CAD) file contains specific information about the fibre architecture, which is controlled via anisotropic and thermo-mechanical behaviour. By determining the exact amount, location and orientation of those fibres, they were able to calculate and predict how the structure would react when subjected to stimuli such as thermal or mechanical forces. In another project, MIT researchers developed a “bakable robot” made up of printed layers that could fold into a pre-determined three-dimensional structure when heated (Hardesty, 2014). The material structure is composed of a polyvinyl chloride (PVC) sheet sandwiched between two films of rigid polyester. When heated, the PVC layer contracts and the edges fold, leading to the pre-determined geometry being formed. The work by Byoungkwon and Rus (2012) from the same research group also described the use of algorithms that could intelligently program and control sheet material that could self-fold into a desired shape. Other working prototypes that were demonstrated include a self-folding coil and a strain sensor, which could vary the current passing through it when compressed.
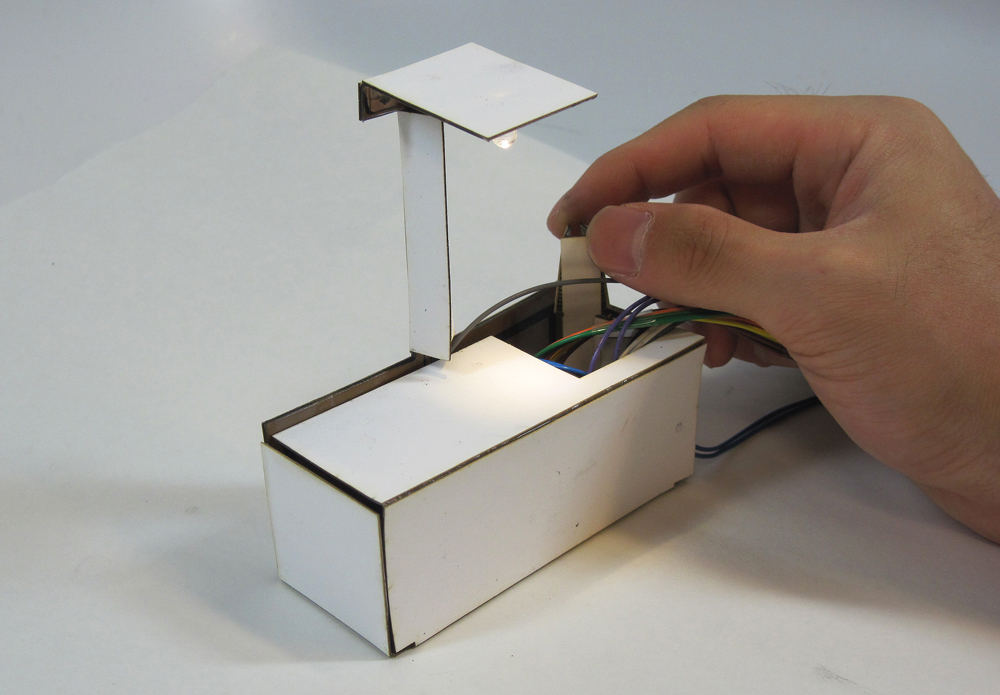
Taking a step further, researchers at Harvard University (Shin, et al., 2014) have developed a proof-of-concept 3D printed lamp which incorporates “shape memory” polymers that contain embedded electronics. The rest of the sheet consists of layers of copper, paper and foam. The flat surface folds into a lamp that can be switched on. They claim that nearly all of the parts were printed using a 3D printer comprising of the shape-memory polymers, the structure, the mechanical switch, the wiring and the capacitive touch sensors. Only the wires and the LED were manually added to the lamp.
Vision of the Future
This story tells of a growing trend where over the last couple of years we have witnessed the wonders of Additive Manufacturing being able to print objects of all shapes, materials and sizes but they were virtually inanimate. However, better understanding and the availability of new technologies and materials mean that 3D printed parts can now be programmed to be reactive to the environment with embedded electronics now being considered. In the near future, we should anticipate materials such as Graphene, which has excellent electrical conductivity and strength to become available for AM. This is a very exciting time for the industry not just for 4D-ready materials and products; but also in 4D bio-printing which includes engineering human tissues using printed bio-materials made of both soft and rigid microstructures. 4D printed parts will be prevalent where a new generation of machines will have the capability to fabricate parts that are visually realistic and functionally capable, just like the face duplicator in Mission Impossible.
This article has been written specifically for 3DPI, based on a research version from the Assembly Automation Journal. Volume 34, Issue 2, “4D Printing – Revolution or Fad?”
References
Byoungkwon A. and Rus, D. (2012), “Programming and Controlling Self-Folding Robots”, Robotics and Automation (ICRA), IEEE International Conference on Robotics and Automation (ICRA) 2012, St. Paul, MN, USA, 14-18 May 2012.
Clarkson, R. (2014), “Blossom” available at: http://richardclarkson.com/blossom (accessed 1 February 2014)
Ge, Qi., Qi, H. Jerry and Dunn, Martin L. (2013), Applied Physics Letters Vol. 103 Iss. 131901 “Active materials by four-dimension printing”
Hardesty, L. (2014), “Bake your Own Robot”, MIT News Office, available at: https://newsoffice.mit.edu/2014/bake-your-own-robot-0530 (accessed 16 June 2014).
Pei, E. (2014), “4D Printing – Revolution or Fad?” Assembly Automation, Vol. 34 Iss. 2, pp.123 – 127.
Shin, ByungHyun; Felton, S.M.; Tolley, M.T., and Wood, R.J. (2014), “Self-Assembling Sensors for Printable Machines”, IEEE International Conference on Robotics and Automation (ICRA) 2014, Hong Kong, China, 31 May – 7 June 2014.
Tibbits, S. and Cheung, K. (2012), “Programmable materials for architectural assembly and automation”, Assembly Automation, Vol. 32 Iss: 3, pp.216 – 225
Tim Flattery (2014), “Mission Impossible gadget renders, an interpretation of those from Paramount Pictures Mission: Impossible III film”, http://www.timflattery.com/work/mission-impossible (accessed 1 July 2014).
