
At this year’s World Economic Forum in Davos, ETH Zurich’s robotic engineers showcased their self-learning ice-skating robot, named, Skaterbot.
Exhibiting the robot, Stelian Coros, the co-creator of Skaterbot and a professor at the Computational Robotics Lab, ETH Zurich said, “I envision a moment in the not-too-distant future where it will be as easy to create robots as it is to currently make structures out of LEGO blocks.”
Going skating with Skaterbot
The field of robotics in recent years has received a helping hand from 3D printing technology. Due to its design and manufacturing capabilities, the technology is also being researched in the field of soft robotics.
Professor Coros himself has done extensive research in robotics and 3D printing technology. In the recently held ETH Zurich’s RETHINKING DESIGN exhibition in Davos as part of the World Economic Forum 2019, Professor Coros and his team displayed two versions of the Skaterbot, one with wheeled legs and another with ice skating blades.
The Skaterbot had its origin in the study called Skaterbots: Optimization-based design and motion synthesis for robotic creatures with legs and wheels which introduced the computational design approach to making 3D printed robots.

Computational 3D design
The computational design approach lets users program the Skaterbot at a higher level and then the robot adjusts its movements according to the defined parameters. As the research paper states: “gliding and skating motions arise naturally as a function of the design characteristics of different robots.”
Instructions could include movement path or speed of the robot. Once these parameters are set Skaterbot works out motion patterns, such as swizzling and stroking, for itself. In future “we plan to address the generation of increasingly agile motions. Drifting maneuvers, for example, leverage slipping to great effect, which is currently outside the capabilities of our model,” the paper states.
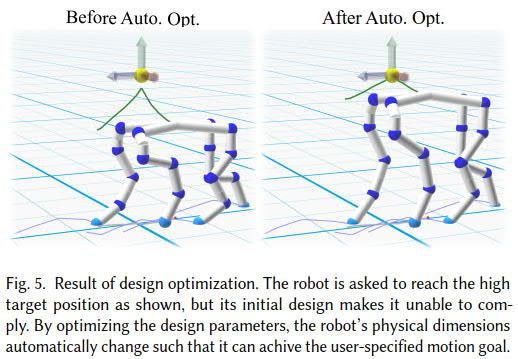
Furthermore, in the design stage, the robot can be directed that it should reach a certain point on the z-axis. If the point is too high for the height of the robot the computational design optimization algorithm adjusts the dimensions of the robot.
“we developed a suite of user-guided computational tools that support manual, semi-automatic and fully automatic optimization of the robot’s physical dimensions.”
A modular 3D printed robot
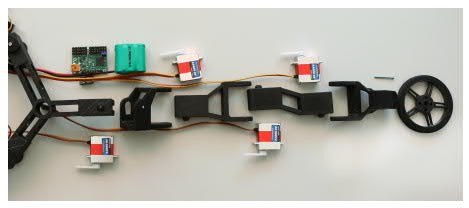
As the interactive design capability can generate various versions of the Skaterbot, 3D printing technology is a perfect fit to build it. The limbs of the Skaterbot have a modular design and can be 3D printed. For their study, the ETH engineers made the Skaterbot limbs with a Stratasys F370 3D printer. Other components of the robot included Turnigy TGY-306 servo motors, a Pololu Maestro USB controller, and a 7.4V battery.
Appraising the efforts of his team at the Davos conference, Professor Coros said, “Considering that these are our first baby steps on ice, I think that our robot did quite well.”
The paper discussed in this study is titled Skaterbots: Optimization-based design and motion synthesis for robotic creatures with legs and wheels. It was published in the ACM Transactions on Graphics journal and was jointly authored by Moritz Geilinger, Roi Poranne, Ruta Desai, Bernhard Thomaszewski, and Stelian Coros.
Nominations for 3D Printing Awards 2019 are open now. Take a moment to choose the best research team.
For more news on robotics subscribe to our 3D printing newsletter or follow us on Facebook and Twitter.
If you are looking for a career in additive manufacturing then our 3D Printing Jobs board is the best place to start.
Featured image shows ETZ Zurich’s Skaterbot on ice. Clip via ETH Zurich on YouTube