
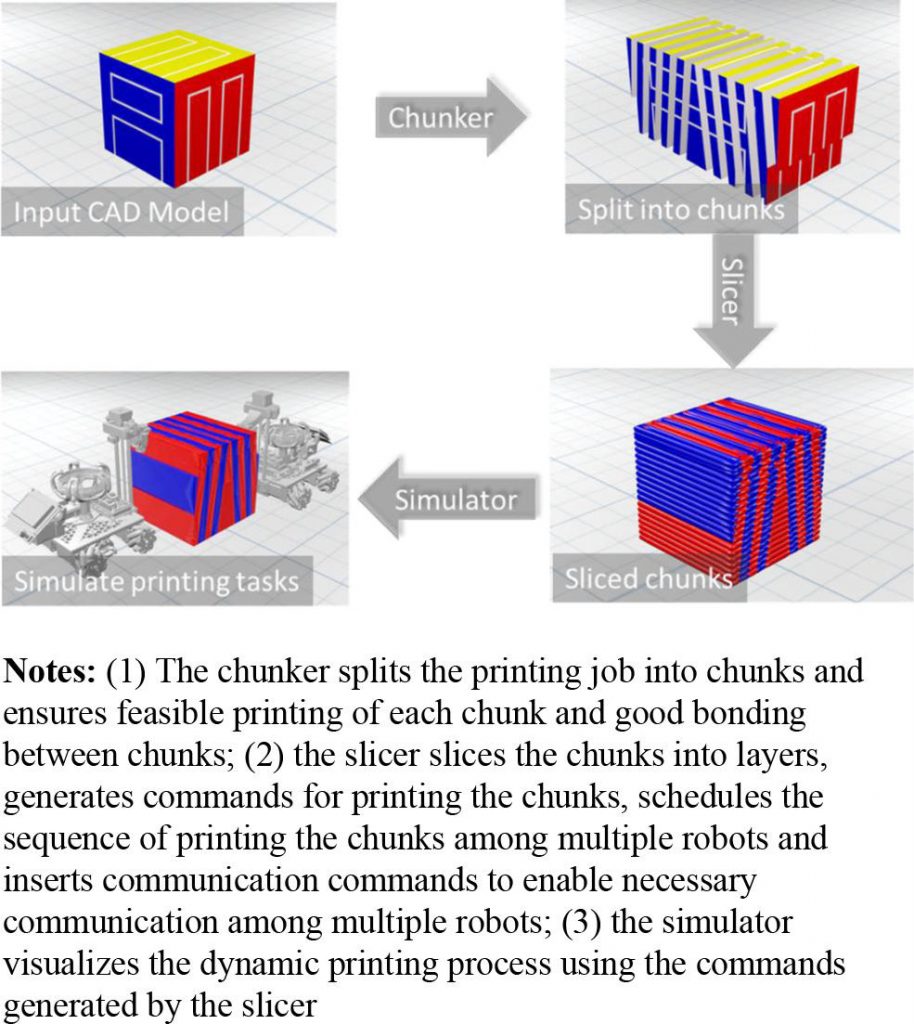
In a paper recently published in Rapid Prototyping Journal, scientists detail a new slicing approach for multiple 3D printers working on the same object. In place of the typical layer-by-layer approach, this team proposes the “Chunker” that breaks CAD models down into chunks that are designated to different mobile additive manufacturing systems.
According to the social implications of this paper:
“The chunk-based slicing algorithm is critical to the success of cooperative 3D printing, which may enable an autonomous factory equipped with a swarm of autonomous mobile 3D printers and mobile robots for autonomous manufacturing and assembly.”
3D printing for cobots
The Chunker slicing method is proposed by Jace McPherson and Wenchao Zhou from the University of Arkansas. In the research, McPherson and Zhou describe a large scale 3D printing project that relies on the collaboration of two mobile robots, or “cobots.”
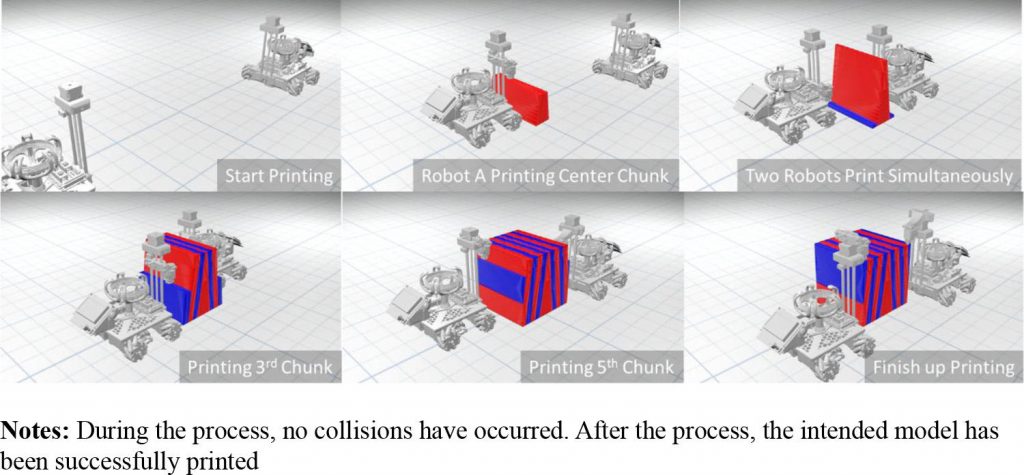
Both of these cobots are simultaneously 3D printing the same object. However, as the researchers state, “the traditional lay[er]-based slicing scheme does not work” for this operation. It does not adequately simulate the path required for both cobots.
Chunk by chunk
In McPherson and Zhou’s proposal the layer slices of a 3D model are also divided into chunks (colored red and blue in the diagrams below) to better demonstrate how cobots work together to 3D print a structure.
The automated vizulation ensures both the “feasible printing,” “good bonding between” each chunk and that cobots don’t collide when in operation.
Toward an “autonomous digital factory”
Further development of the Chunker method seeks to prove the viability of this method for a large number of cobots, to “realize” McPherson and Zhou’s “autonomous digital factory equipped with a swarm of mobile 3D printers.” One potential application discussed in the conclusions of the paper is the fabrication of electromechanical devices. With the future addition of the ability to pick and place pre-fabricated components, the research also seems to have great potential in 3D printed architecture. At present, pre-fabricated features of buildings, i.e. pipes, electrics, windows etc. have to be manually put in place.
McPherson and Zhou conclude:
“The results show great promise to a new direction of 3D printing that may provide a path to make 3D printing a mainstream manufacturing technology with autonomous printing robots.
“A chunk-based slicer for cooperative 3D printing” is published online in Rapid Prototyping Journal. It is co-authored by Jace McPherson and Wenchao Zhou of the Department of Mechanical Engineering at the University of Arkansas.
For all the latest additive manufacturing research subscribe to the 3D Printing Industry newsletter, follow us on Twitter and like us on Facebook.
Seeking jobs in academia? Create a free profile on 3D Printing Jobs, or advertise (for free) to find expertise in your area.
Featured image shows Chunker based 3D printing with mobile robots. Image via Rapid Prototyping Journal
