Researchers from China’s National University of Defense Technology (NUDT) are using 3D printing to improve the design of Search and Rescue (SAR) and Explosive Ordnance Disposal (EOD) robots.
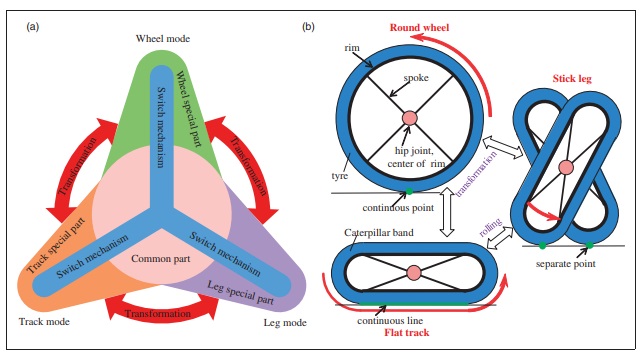
In an effort to make such robots more adaptable to terrain, the NUDT team developed a compact wheel-track-leg hybrid system based on a novel transformable mechanism. This integrated device enables the transition from a wheel to a track or a leg, for multimodal transportation.
The research paper, published in the Journal of Mechanical Engineering Science, explains: “Using robots to replace humans brings many benefits, which can not only reduce injury and death but also save precious time.”
“Working in unconstructed and unpredictable fields, the robots are supposed to have high speed and excellent terrain adaptability. [However], traditional mobile robots with singular motion mechanism cannot reach the above-mentioned requirements.”
A transformable wheel
According to NUDT research, robots using wheels, tracks, or legs each have their own advantages and disadvantages. Wheel robots, for example, are able to run speedily and efficiently on even roads, however, they are limited by climbing ability. Conversely, track robots are said to be adaptable to soft and wet terrains but speed and efficiency are low. And leg robots can tackle various obstacles, yet they are complex in design and control.
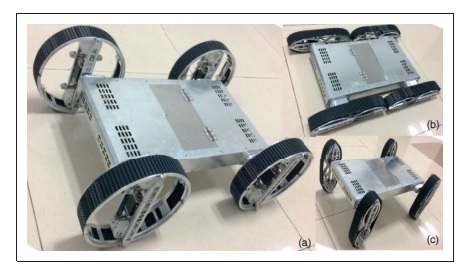
By combining all three designs, the NUDT team sought to leverage the benefits of each of the transportation methods for optimal terrain adaptability. In realizing this concept, the team used 3D printing to create prototypes of the wheels which operated using a transition mechanism.
The wheels were then created using conventional methods using a foldable rim structure made of four identical arc rims. Within the entire hybrid robot, one motor drives the transformation of the foldable rim, while two other motors drive the locomotion of the transformable wheel.
3D printed development
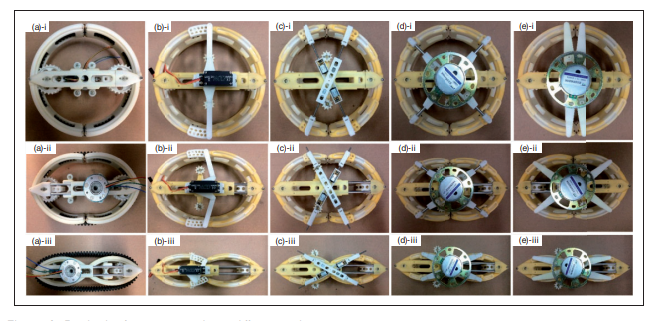
Before settling on the arc rims for the frame of the transformable wheels, various spokes were 3D printed using FFF to experiment with the design of the spokes. During this stage, telescopic spokes were proposed – a design previously used by Carnegie Mellon University researchers for other novel SAR robots.
Through testing the prototypes, the NUDT researchers found that its robot could change its locomotion mode in real time while it is moving, showing “excellent terrain adaptability and flexibility in the unpredictable ground.”
Currently, the team is developing the control algorithm and motion strategies to fit variable terrains of the robot.
“Transition mechanism design of a hybrid wheel-track-leg based on foldable rims” is co-authored by Faliang Zhou, Xiaojun Xu, Haijun Xu, Teng’an Zou, and Lei Zhang.
For more of the latest 3D printing research follow us on Twitter, like us on Facebook and subscribe to our newsletter. Also, join 3D Printing Jobs now for opportunities in academia.
Featured image shows five kinds of supporting 3D printed spokes in different modes. Image via NUDT.