A team of researchers from UC San Diego has developed a new method of 3D printing liquid crystal elastomers (LCE), one that enables functionally graded properties simply by varying the printing parameters.
With potential applications as an actuating material for soft robotics and artificial muscles, the LCE’s stiffness and contraction capabilities can be closely controlled with heat, both during and after printing.
Zijun Wang, First Author of the study, explains: “3D printing is a great tool for making so many different things – and it’s even better now that we can print structures that can contract and stiffen as desired under a certain stimulus, in this case, heat.”
How do liquid crystal elastomers work?
LCEs are capable of highly reversible actuation while, at the same time, producing large work densities. In theory, this makes them great for novel soft robots and wearable devices, but previous attempts to 3D print the material with graded, or varying, properties has proven difficult. For example, you’d probably want the joints of your robot to be more flexible, but the load bearing beams to be a little stiffer.
Taking a closer look, the actuation action of an LCE is determined by the change in the orientation of its mesogens (fundamental units that make up a liquid crystal). A number of methods have previously been employed when attempting to realign mesogens, including mechanical stretching and magnetic fields – each with their unique limitations.
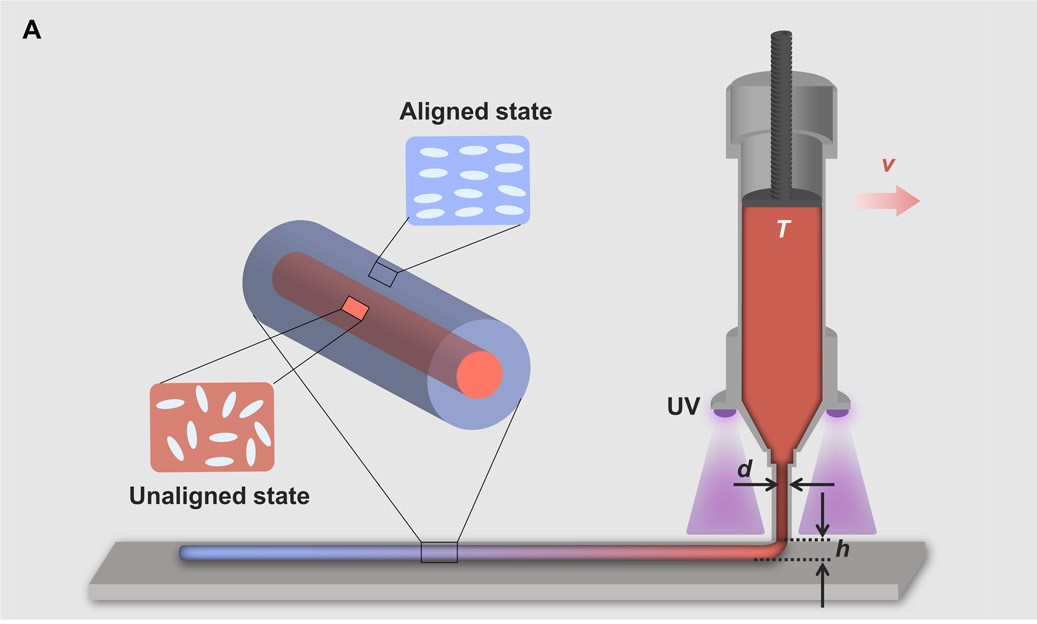
As it stands, the most successful method of printing LCE structures is the direct ink writing technique, whereby controlled volumes of a liquid ink are dispensed out of a micronozzle and cured under UV light. The mesogens have previously been observed to align themselves spontaneously along the printing path as a result of the shear stresses caused by extrusion. Taking this direct ink writing technique and running with it, the San Diego researchers put their own spin on the process and experimented with variations in the printing temperature.
3D printing functionally-graded LCE structures
By first examining the material’s characteristics, the team was able to determine that the extruded LCE had a core-shell structure. The shell, being on the outside, cools more rapidly and becomes stiffer, suspending the well-aligned mesogens in a high-viscosity matrix. The core, on the other hand, stays heated for longer and remains malleable, meaning its mesogens are relatively free to return to their chaotic, unaligned state.
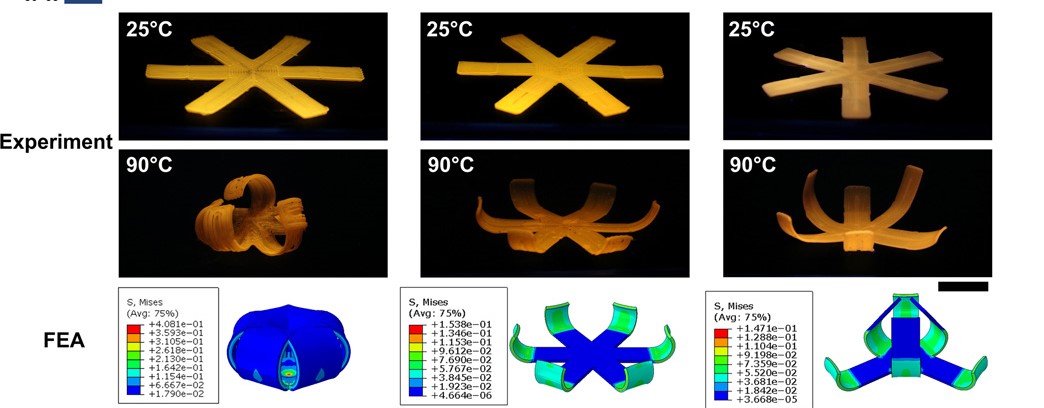
To test this seemingly fundamental relationship between heat and stiffness, the researchers printed a number of geometries with varying temperature profiles. A disk was first printed at 40°C and heated to 90°C in a water bath, morphing into a more conical shape. However, when the same disk was printed at varying temperatures with increasing intervals – 40°C, 80°C, then 120°C – it morphed into a completely different shape upon being placed in the water bath.
The same dynamics were observed when printing a tubular structure. The LCE tube, when printed at tweaked temperatures, could stick to a glass surface much longer, when actuated, than one which had been printed at a constant temperature. With this, the team had essentially produced a very rudimentary robotic gripper. The next steps for the research involve the development of new and novel inks that are reprogrammable and even recyclable.
Further details of the study can be found in the paper titled ‘Three-dimensional printing of functionally graded liquid crystal elastomer’. It is co-authored by Zijun Wang, Zhijian Wang, Yue Zheng et al.
The field of soft robotics is a well-researched one, with new developments achieved every year. A team of researchers from Linköping University, Sweden, recently developed a set of microactuators suitable for soft microrobots using a custom-built extrusion-based 3D printer. The actuators contain an electrically-active polymer that can change its geometry in the presence of an electrical charge, granting the actuators 4D capabilities.
Elsewhere, in Asia, researchers have recently 3D printed a soft robotic finger. The device is powered by an embedded single-electrode triboelectric curvature sensor (S-TECS), and can sense bending curvature at ultralow working frequencies without the need for any external power source.
The 4th annual 3D Printing Industry Awards are coming up in November 2020 and we need a trophy. To be in with a chance of winning a brand new Craftbot Flow IDEX XL 3D printer, enter the MyMiniFactory trophy design competition here. We’re happy to accept submissions until the 30th of September 2020.
Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter and liking us on Facebook.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.
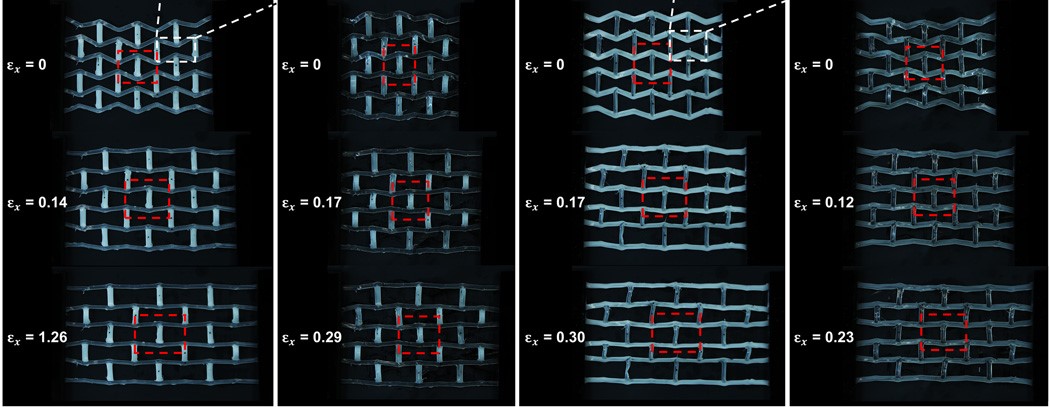
Featured image shows an active lattice structure composed of functionally graded LCE. Image via UC San Diego.
