A team of researchers led by the Computational Robotics Lab at ETH Zurich’s Department of Computer Science and the University of Haifa, have deployed a two-armed robot to create complex 3D models.
Using heated metal wire, the bot is able to carve elaborate shapes from polystyrene foam, without needing to engage in any physical contact with the material. The technology has produced a range of 3D prototypes with doubly-curved surfaces, that are difficult to achieve with conventional straight-wire cutting methods, such as CNC machining and wireframe fabrication.
The YuMi IRB 14000 robot
Sculpting styrofoam using hot wire is not a new production technique in itself, as Dungeons and Dragons players will be able to attest to. Nonetheless, the process often requires a great deal of time, effort, and refinement using other tools. In addition, traditional cutting methods use straight hot wires to cut polystyrene into shapes, but this approach only permits basic cuts and doesn’t allow for the production of models with complex geometries.
While hot wire cutters are routinely mounted onto machinery in milling shops for this purpose, they too can only produce ruled surfaces. CNC machines are utilized in a similar way (albeit using a drill piece instead of wire), but it can be difficult to program a path that creates the desired surface while respecting the constraints imposed by the machine. Danish engineers conducted related research during its project in 2016, which used hot-wire cutting to produce doubly-curved surfaces with one single sweep. According to the Swiss researchers though, this method had limitations that required the cutting blade to stay planar, and the system needed user input to solve non-trivial problems.
The researchers’ new method uses a robot called YuMi IRB 14000, which is equipped with two arms to make the process more efficient. Wielding an inextensible elastic metal rod on the end of each limb, its ‘hands’ move with seven degrees of freedom, giving it excellent dexterity. By programming the bot’s appendages to effectively work together, the researchers were able to create 3D designs with precision.
Once given a target shape, the robot’s tailored software generates a sequence of trajectories, and sweeps one of its rods through the workpiece to create a cut. The trajectories are optimized to move its ‘hands’ in the most efficient way, and to reduce the difference between the current workpiece and the target shape. Working alongside a sequential path planning tool, this allows movements to be either fully-automated or user-controlled.

Creating a robotic masterpiece
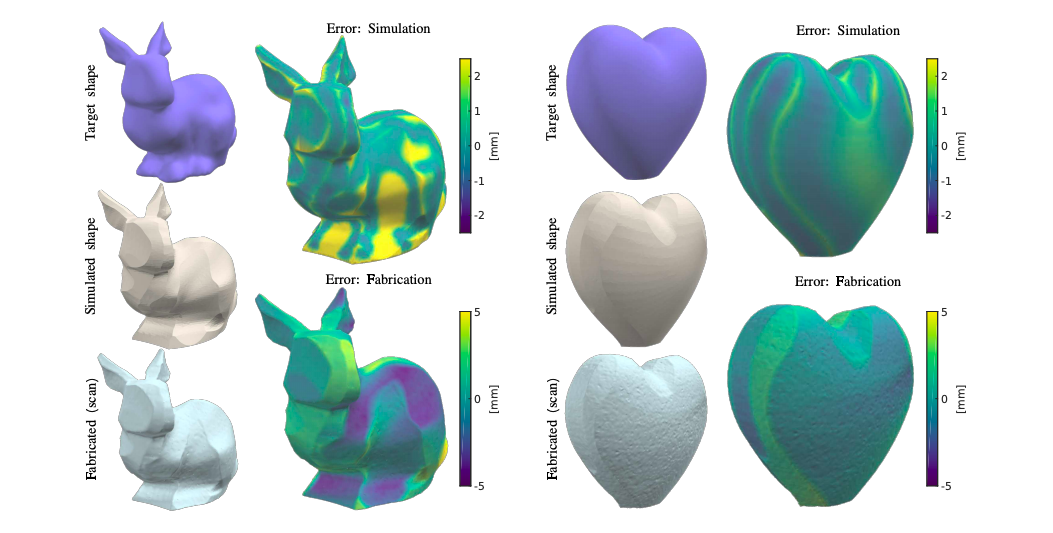
The method was assessed by creating a diverse set of simulation examples, as well as several physical prototypes including models of a hand, heart, shark, and hummingbird. During testing, a cubic block of polystyrene foam with an edge length of 290mm was mounted onto a tripod and manually turned between cuts. The wire, with a diameter of 1mm, was connected to a power source of 6.6 Amperes and 4.6 Volts, heating it to a temperature of around 250℃. Heating the wire ensured that the material was melted just before contact, and produced surfaces that are not possible using conventional methods, according to the researchers.
The time to create the models varied on hardware and complexity, so that the more intricate hand model took four hours to complete, while the bunny model took just two hours and 20 minutes. When compared to their corresponding simulated shapes, the bunny and heart models exhibited mean average errors of 1.97mm and 0.76mm respectively. The researchers put this down to a lack of stiffness in the robot’s arms, and the use of tripod mounting, which limited the accuracy with which it could be positioned.
Other limits to the design were acknowledged by the researchers too, such as the rod used to manipulate the material, which can only be bent and warped a certain amount before it needs to be replaced. In addition, existing software used to program the robot only allows for a series of cuts to be made by the bot’s arms, rather than enabling the creation of a masterpiece in one sitting.
Although it wasn’t tested, the Swiss researchers acknowledged that an increased wire temperature could lead to higher cutting speeds, albeit at the expense of reduced cut quality. The technique could also be applicable to other materials in the future, but for now, the technology is only in the early stages of development, and we could still be years away from the first robotic Picasso.
Robotic arms produced using additive manufacturing
3D printing has been used to create robotic arms for a wide variety of purposes ranging from biotic hands for holding tools, to the creation of a full mechanical humanoid.
China’s Shenzhen Yuejiang Technology Co. debuted three generations of its DOBOT robotic arms at CES in 2018. The DOBOT Magician variant was compatible with five different tool heads: a 3D printer hot end, laser, pen holder, vacuum cup, and gripper.
Desktop 3D printer manufacturer BCN3D Technologies released an open-source robot arm with a 3D printed structure in July 2016. The technology was developed for educational purposes and could be edited, improved, and changed to suit the needs of the user, whilst being reproducible at a low cost.
Italian technology startup Youbionic used additive manufacturing to create an augmented humanoid in November 2018. The ‘centaur’ design was created by adding the arm attachments the company had developed a year earlier, to a robotic spine.
The researchers’ findings are detailed in their paper titled “RoboCut: Hot-wire Cutting with Robot-controlled Flexible Rods,” co-authored by Simon Duenser, Roi Poranne, Bernhard Thomaszewski, and Stelian Coros.
You can now nominate for the 2020 3D Printing Industry Awards. Cast your vote to help decide this year’s winners.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows the YuMi 14000 robot being programmed by a test engineer. Photo via ABB Robotics.
