A team of researchers from Linköping University, Sweden, has developed a set of microactuators for soft micro robotics using a custom-built extrusion-based 3D printer. The actuators contain an electrically-active polymer that changes shape – after being printed – in the presence of an electrical charge, granting them 4D capabilities.
While 4D printed soft robots are usually limited to the centi- or milli-scale, the specially developed technology allowed the researchers to scale down their actuation mechanisms to the micron domain, with thicknesses in the region of about 20 microns. They claim their custom machine is versatile and scalable, and expect to “broaden the purview of soft robotics” with previously unseen complex microrobots.
Electroactive polymer technology
Electroactive polymer (EAP) technology is the driving force behind many soft robotic devices. It describes materials that activate, or actuate when subjected to an electrical charge. In soft robots, this is comparable to a muscle contraction (and often looks like one).
According to the researchers, attempting to scale down EAP actuators is often met with a mountain of challenges. Microfabrication techniques such as photolithography are capable of enabling lower actuation potentials and higher power-to-weight ratios but tend to involve complicated processing. This makes it difficult to integrate them with current markets and technologies.
This is where additive manufacturing offers a plethora of benefits, as products can be modified on the fly, energy costs can be cut significantly, and waste production can be reduced ten-fold. Ultimately, the team believes this may make EAP devices cheaper and feasible for a broader range of applications.
4D printed microactuators
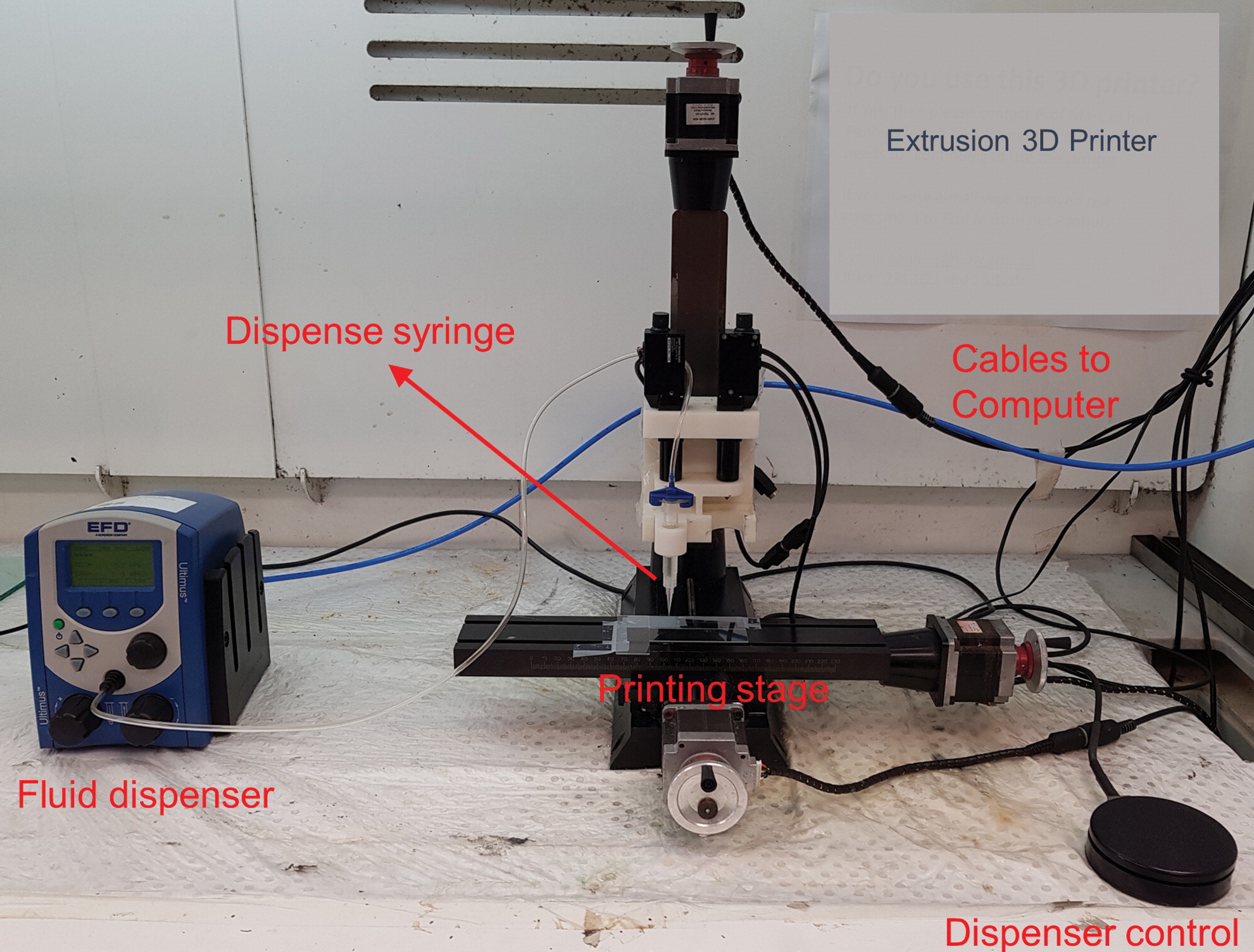
The first stage of the study involved building the printer. The basis of the machine was a three-axis programmable CNC stage kitted out with a high-precision fluid dispensing system. Attached to the dispensing system was a 5mL lock syringe, whereby the extrusion rate was controlled by the lateral motion of the stage. The team used a commercially available glass slide as the build plate.
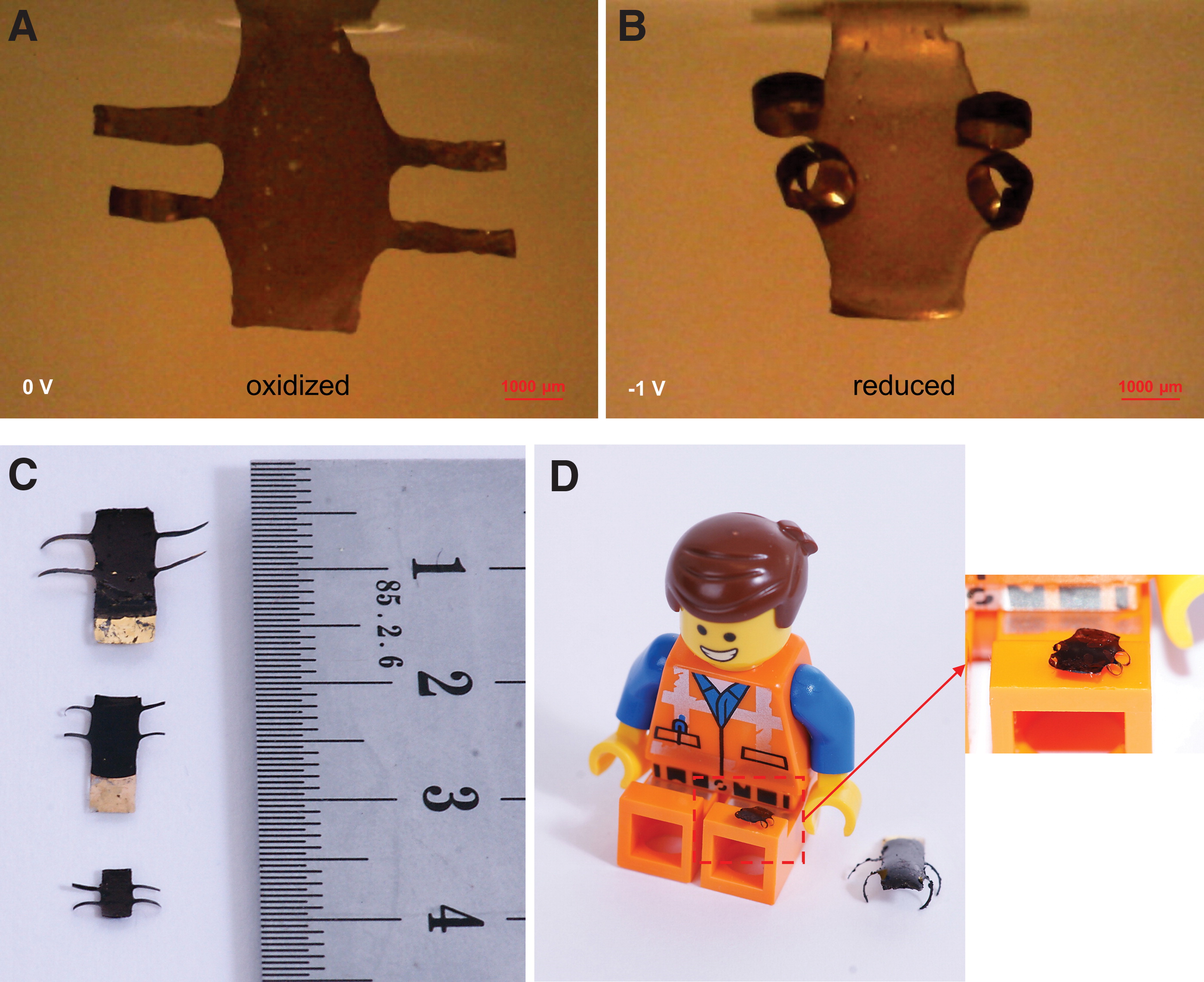
They first placed a thin layer of gold, just 40nm thick, on the glass slide to form a conductive layer. The researchers then used the syringe to dispense a single layer of UV curable urethane acrylate gel onto the conductive layer. The gel would go on to form the ‘body and arms’ of the microactuator. Once the gel was fully cured under UV light, the team deposited a layer of polypyrrole (the EAP) onto the other side of the gold sheet.
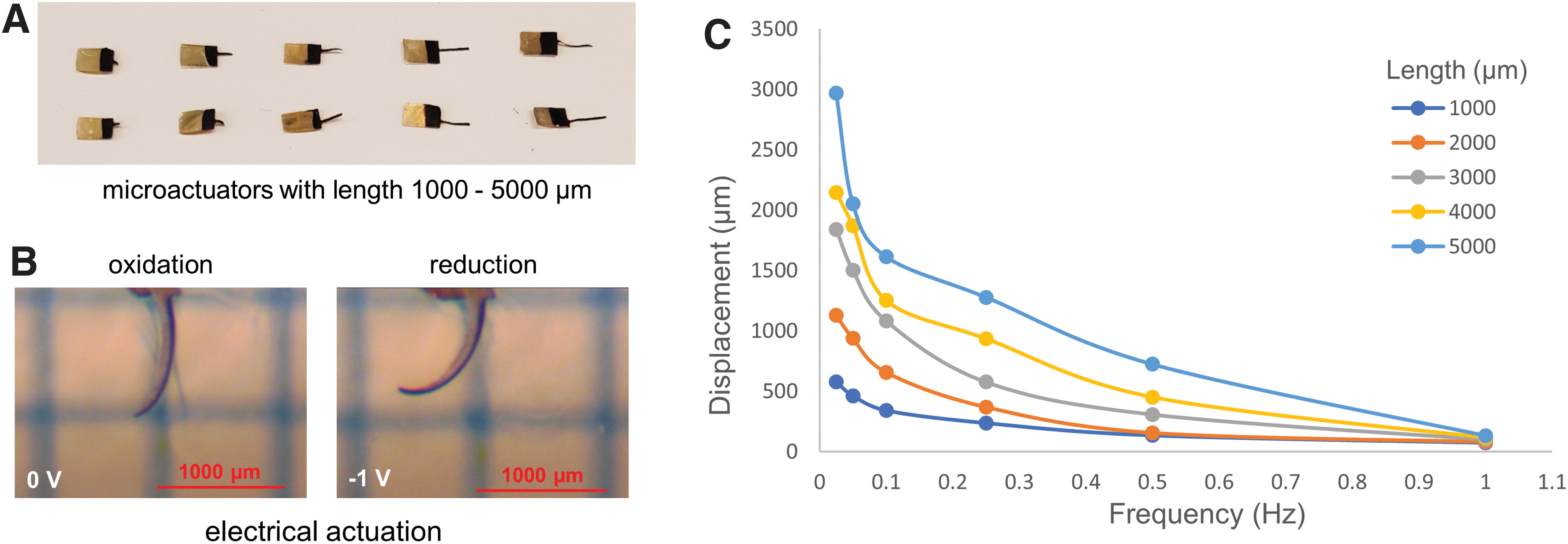
The team managed to repeat this process multiple times, printing microactuators with lengths ranging from 5000 microns all the way down to 1000 microns. The thinnest microactuator they developed was just 20 microns thick. The researchers found that they could actuate the devices with electrical potentials as small as 1V, compared to the typical 1kV+ for other 3D printing methods. The scientists believe their work shows great potential for the miniaturization of low-cost micro robotics developed via 3D printing technology.
Further details of the study can be found in the paper titled ‘3D Printing Microactuators for Soft Microrobots’. It is co-authored by Manav Tyagi, Geoffrey M. Spinks, and Edwin W.H. Jager.
There are a number of different actuation methods when it comes to 4D printed soft robots – electrical actuation being one of them. Researchers from Rice University recently 4D printed their own soft robots that are activated by changes in temperature. They intend to develop the technology to the point where it can be used in biomedical implants that reconfigure themselves on demand.
Elsewhere, at Nanyang Technological University, researchers have taken this a step further and printed soft robots that don’t require any real-time human input at all. The process involves swelling an elastomer with ethanol to induce stress in the structure of the actuator. As the ethanol evaporates on its own and the elastomer dries, the material is deformed by the elastic energy inherently stored in it.
Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter and liking us on Facebook.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows the smallest 4D printed micro-robots. Photo via Linköping University.
