Researchers from Seoul National University (SNU) have developed novel 3D printed sensors that enable humans to remotely interact with deformable soft robotics systems.
The multifunctional devices, which proved capable of stretching and bending into complex shapes at will, also provide optical, microfluidic, and piezoresistive sensing capabilities. During testing, the team were able to integrate their sensors into both wearable and stimuli-driven actuators, allowing users to control multiple robotic appliances from a distance.
Making soft robotics more sensitive
Considerable research has already been conducted into making robotic systems more interactive, both with their environments and humans. Primarily, these studies have focused on sensors that enable responses to inputs such as resistance or light intensity, but many can only detect one deformation mode at a time.
Although microfluidic and fabric devices have shown promise in this area, they can’t distinguish between different types, as they have just one sensing element. Given that a single stimulus can induce multiple deformation responses, the creation of a more adaptable soft sensor therefore remains highly desirable.
A variety of approaches have been taken to creating multimodal robotics, including embedding fluidic channels or sensing elements into elastomeric structures. However, physically combining the sensors into one structure has often affected their size, and increased the complexity of the design and fabrication processes.
The team’s novel multimodal sensor
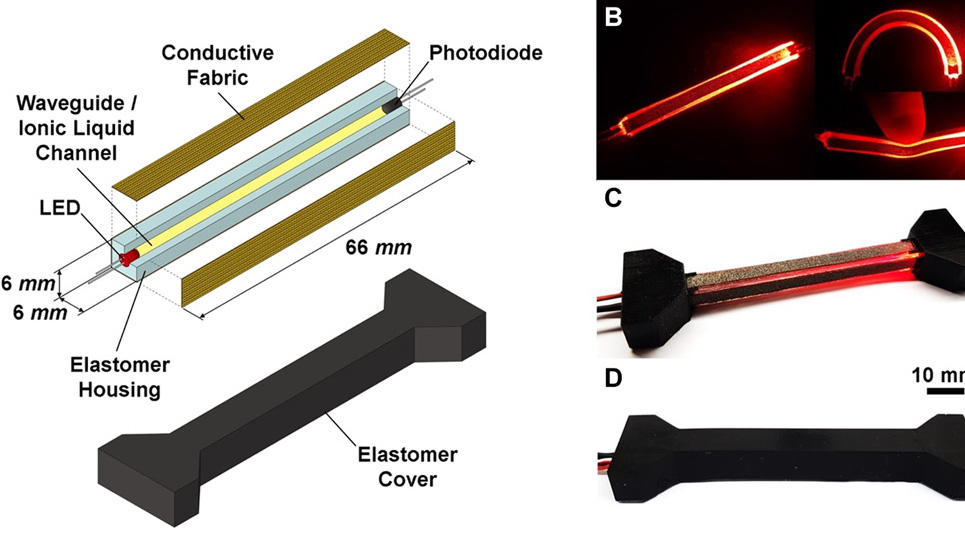
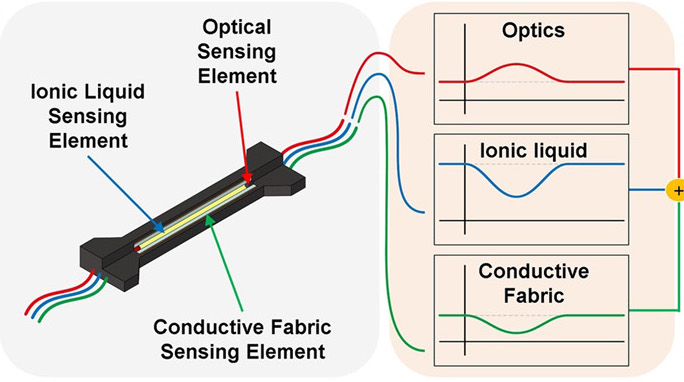
In order to overcome the limitations of prior projects, the team 3D printed a multifunctional sensor, capable of detecting single modes of deformation and decoupling them all at once. The device itself featured a microfluidic channel filled with an ionic liquid, elastomeric housing and a conductive fabric layer.
In theory, when the team’s design was subjected to deformation, its channels would act as a sensor and change its electrical resistance. To put this into practice, the researchers subjected their device to different forces, and deployed a machine learning technique alongside simulations to measure its multimodal abilities.
The sensor was bent off the neutral axis of a rotational joint, before local contact pressure was applied, to simulate stretching, compression and bending. Results revealed that the sensitivity of the device’s signals changed depending on where pressure was applied, showing that it could react to external stimuli.
To demonstrate their sensor’s potential within human-robot interfaces, the scientists constructed two prototype systems. One was a wearable device that enabled users to accurately control a UAV and robotic arm, while the other was a soft robotic ‘wrist’ consisting of four actuators, that could react to external forces.
Although the team conceded that further testing was needed to eliminate manual production steps, they consider their device to be a major step forward compared to other designs. In future, the scientists believe that their sensor could be applied within larger robots, providing them with up to ten different sensing capabilities.
Additive advances in soft robotics
Researchers are increasingly deploying 3D printing as a means of fabricating soft robots with more complex designs and advanced functionalities, from feeling and walking to ‘sweating.’
Scientists from Zhejiang University of Technology, Tianjin University, Nanjing Institute of Technology, and Ritsumeikan University, have developed a 3D printed soft robotic finger. The team produced their additive digit as a proof of concept that multi-material fabrication can be deployed to simplify the robotics production process.
Researchers from Cornell University, meanwhile, have 3D printed a soft robotic muscle that’s capable of controlling its internal temperature through perspiration. The soft, fingerlike actuators, could allow untethered robots to operate for longer periods of time without overheating.
Elsewhere, a team from the University of California San Diego have deployed additive manufacturing to produce walking insect-inspired robots. The budget-minded bots were designed to lower the cost of entry for hobbyists and researchers that are seeking to enter the field.
The researchers’ findings are detailed in their paper titled “Heterogeneous sensing in a multifunctional soft sensor for human-robot interfaces.” The research was co-authored by Taekyoung Kim, Sudong Lee, Taehwa Hong, Gyowook Shin, Taehwan Kim and Yong-Lae Park.
To stay up to date with the latest 3D printing news, don’t forget to subscribe to the 3D Printing Industry newsletter or follow us on Twitter or liking our page on Facebook.
Are you looking for a job in the additive manufacturing industry? Visit 3D Printing Jobs for a selection of roles in the industry.
Featured image shows a diagram of the research team’s 3D printed soft robotic sensor. Image via the Science Robotics journal.
