Researchers from Dartmouth College in New Hampshire have developed a new process that uses heat to control the arrangement of molecular rings within 3D printable gels, enabling them to 3D print objects with different mechanical strengths using a single ink.
Called “kinetic trapping”, the process uses molecular stoppers, referred to as “speed bumps” by the researchers, to change the distribution of molecular rings within an ink to create 3D printable gels that can fold, roll, or hold their shape when activated by moisture.
According to the research team, their method could pave the way for the printing of “fast-responsive actuators” and soft robots using sustainable energy sources, such as variation in humidity, that could be used for medical devices or within industrial processes in the future.
“This new method uses heat to produce and control 3D inks with varieties of properties,” said Chenfeng Ke, an Assistant Professor of Chemistry and the Senior Researcher on the study. “It’s a process that could make the 3D printing of complex objects easier and less expensive.”
How does kinetic trapping work?
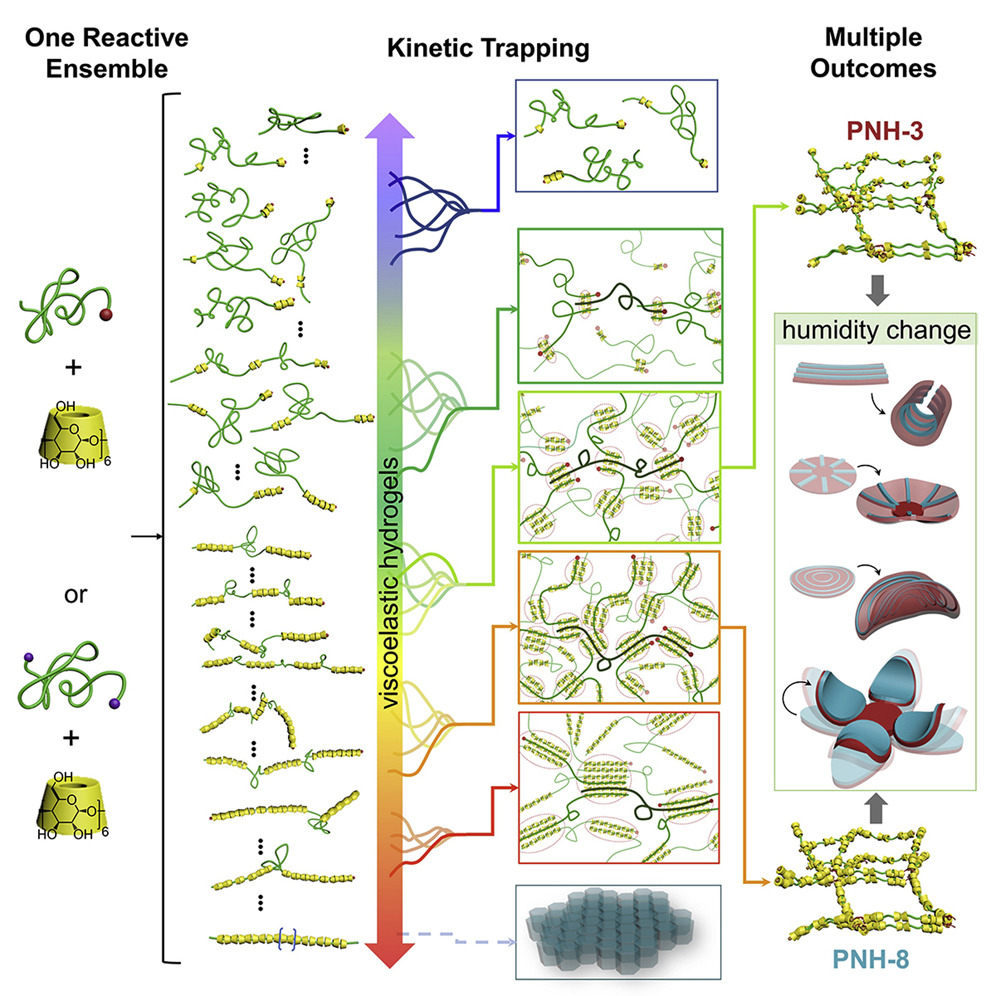
The new process was developed by Dartmouth College’s Ke Functional Materials Group, which focuses on developing smart materials for 3D and 4D printing applications. They describe Kinetic Trapping as a process that uses heat to change the arrangement and number of molecular rings on a chemical chain.
In chemistry, a “ring” refers to a cycle of atoms and bonds within a molecule. By using molecular stoppers – or “speed bumps” – the researchers were able to regulate the number of rings going onto a polymer chain and control their distributions using heat. When the rings are bunched up, they store kinetic energy that can be released, similar to when a compressed spring is let loose.
The molecular speed bumps used in the process create an ink that alters the distribution of molecular rings over time, and change the material from a powder into a 3D printable gel. Moisture is then used to activate different shapes within the 3D printed object.
The materials used by the Dartmouth team consisted of molecular structures made of cyclodextrin and polyethylene glycol, which are substances often used as food additives and stool softeners. The researchers accessed the energy-holding “meta-stable” states of these structures by installing the speed bumps on the polyethylene glycol, transforming the 3D printed objects into actuators that change their shape in response to moisture.
“This method allows us to use temperature to create complex shapes and make them actuate at different moisture levels,” said Qianming Lin, First Author of the study.
Demonstrating proof of concept
According to the researchers, the majority of common 3D printing inks feature uniform molecular compositions that deliver printed objects with a single property, such as stiffness or elasticity. As such, printing an object with multiple properties requires preparing different inks and engineering them to work together, which is both a time-heavy and energy-intensive process.
To address these drawbacks, kinetic trapping was developed by the researchers to produce 3D printed objects that become actuators capable of responding to moisture and changing shape.
To demonstrate their research, the team 3D printed a flower using an ink produced by kinetic trapping. Different parts of the flower were found to have different levels of flexibility due to the variable arrangement of molecular rings. The mixture of properties subsequently created allowed the soft “petals” of the flower to close when they were exposed to moisture, while the firmer parts of the flower provided structure.
“The different parts of this object came from the same printing ink,” explained Ke. “They have similar chemical compositions but different numbers of molecular rings and distributions. These differences give the product drastically different mechanical strengths and cause them to respond to moisture differently.”
Going forwards, the research team will look to refine the kinetic trapping process to enable precision control of multiple meta-stable states. This, they hope, will allow for the printing of fast-responsive actuators and soft robots that respond to humidity variations and other sustainable energy sources.
According to the team, the resulting 3D printed objects could be used for medical devices or within industrial processes in the future.
More information on the study can be found in the paper titled: “Kinetic trapping of 3D printable cyclodextrin-based poly(pseudo)roxtaxane networks”, published in the Chem journal. The study was co-authored by Q. Lin, L. Li, M. Tang, L. Zou, K. Ito, C. Ke, S. Uenuma, J. Samanta, S. Li, X. Jiang.
3D and 4D printed actuator advances
The field of additively manufactured soft robotics and actuators is a well-researched one, with new developments continually under development. The production of shape-shifting materials in response to external stimuli, such as time or temperature, is often referred to as 4D printing and has garnered increasing interest in recent years.
For instance, a team of researchers from Linköping University in Sweden developed a set of microactuators for soft micro-robotics. The actuators contained an electrically active polymer that changed shape in the presence of an electrical charge, granting them 4D capabilities.
Elsewhere, Yamagata University scientists developed a fully 3D printed actuator that could form the basis of a jellyfish-like soft robot for marine wildlife monitoring applications, while researchers from UC San Diego have discovered a new method of 3D printing liquid crystal elastomers that enables functionally graded properties by varying heat printing parameters during and after printing. The resulting actuating material has potential applications for soft robotics and artificial muscles.
Meanwhile, researchers from Rice University in Texas have been working on a new method for enabling increased control over shape-shifting materials in 4D printing, which allows 3D printed objects to take on alternate forms when exposed to changes in temperature, electric current, or stress.
Subscribe to the 3D Printing Industry newsletter for the latest news in additive manufacturing. You can also stay connected by following us on Twitter and liking us on Facebook.
Looking for a career in additive manufacturing? Visit 3D Printing Jobs for a selection of roles in the industry.
Subscribe to our YouTube channel for the latest 3D printing video shorts, reviews and webinar replays.
Featured image shows the Kinetic Trapping process developed by the Ke Functional Materials Group at Dartmouth College. Image via Chem.
